机器学习基石CH8:Noise and Error
CH8: Noise and Error
[toc]
Noise and Probabilistic Target
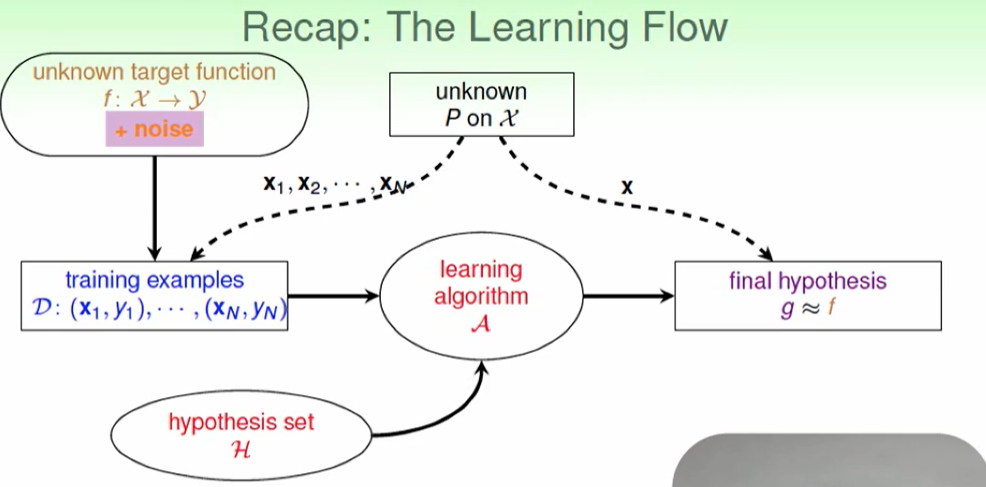
我们之前对于机器学习的流程如下图:
那么在加上noise后是否会影响机器学习呢?
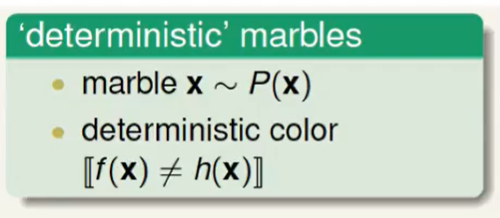
原来的瓶子里抽弹珠是确定的,即输入x,出来就是f(x) :
现在出来可能有一些不是f(x)了,即出现了噪声:
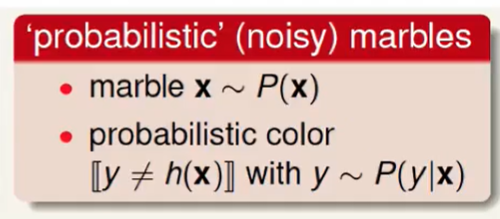
但是这并不影响我们估计一个。
那么:
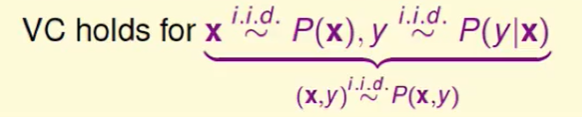
VC Bound依然适用。

我们以前的机器学习都是target,而今天是一个target distribution,即一个目标分布。
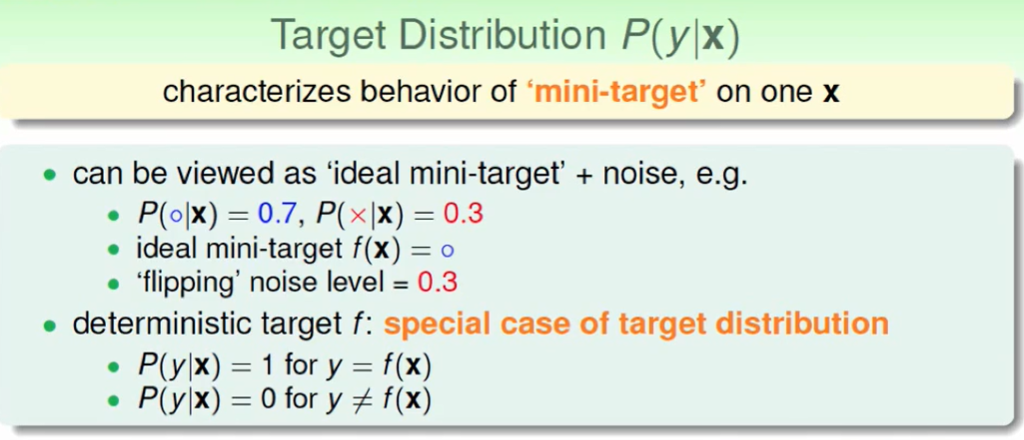
target distribution的看法
- 在这里他把distribution看作是 最理想的目标函数和 noise 的组合(0.7 + 0.3),所以我们把0.7当作target,然后我们会犯30%的错误。
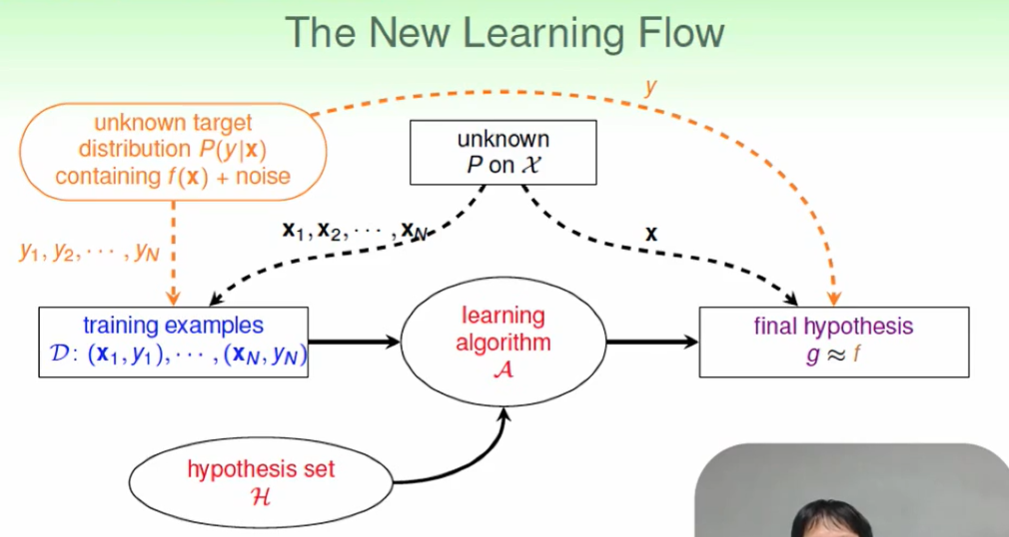
新的learning flow:
Error Measure
错误率的计算方式:
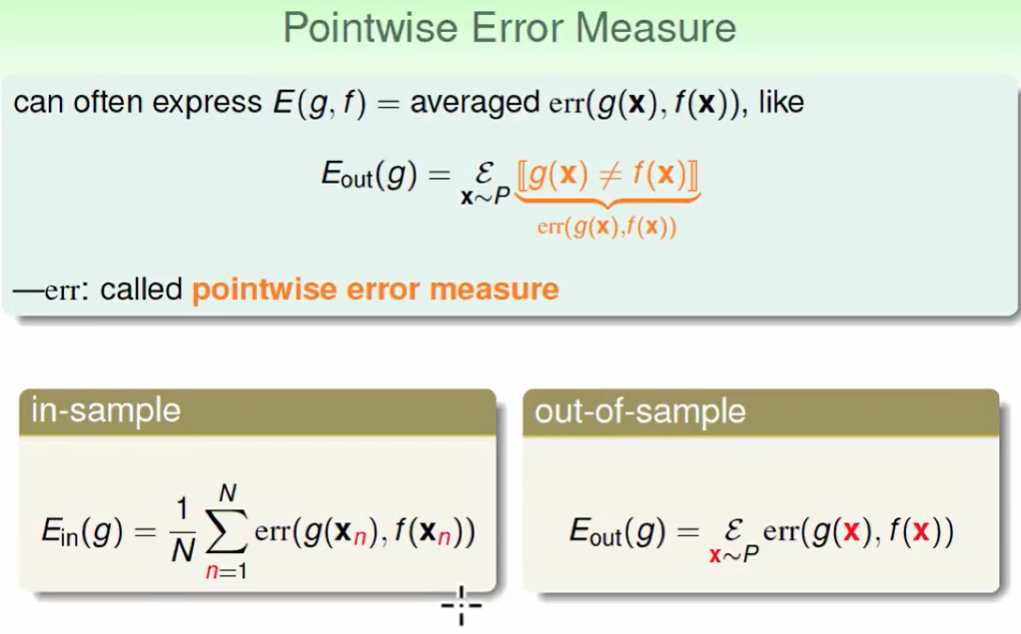
pointwise error measure
这个就是每个都测一遍,然后统计一下错误率,这也是最常用的。
two important pointwise error measure(分别是0/1 error 和 squared error)
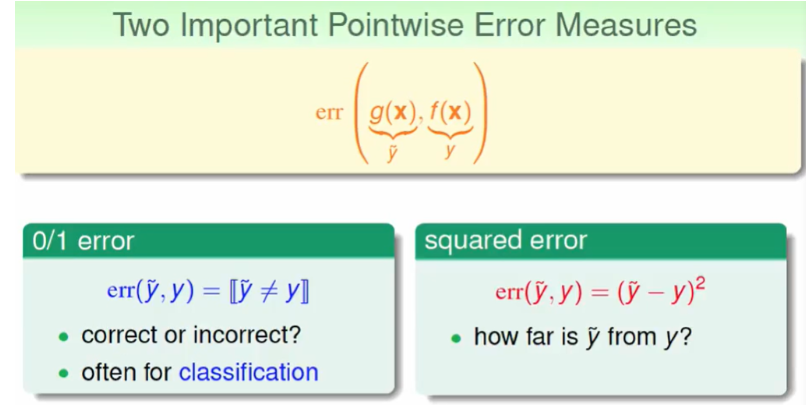
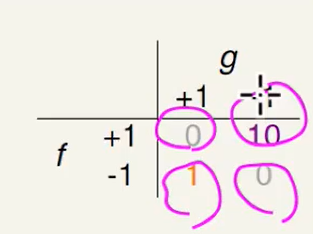
举一个0/1 error 和 squared error的区别:
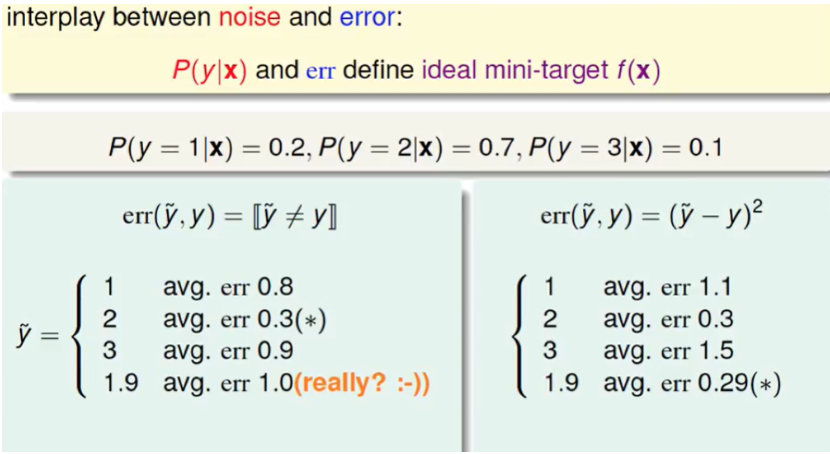
可以看出不同的错误测量的准则会影响我们选取的结果。
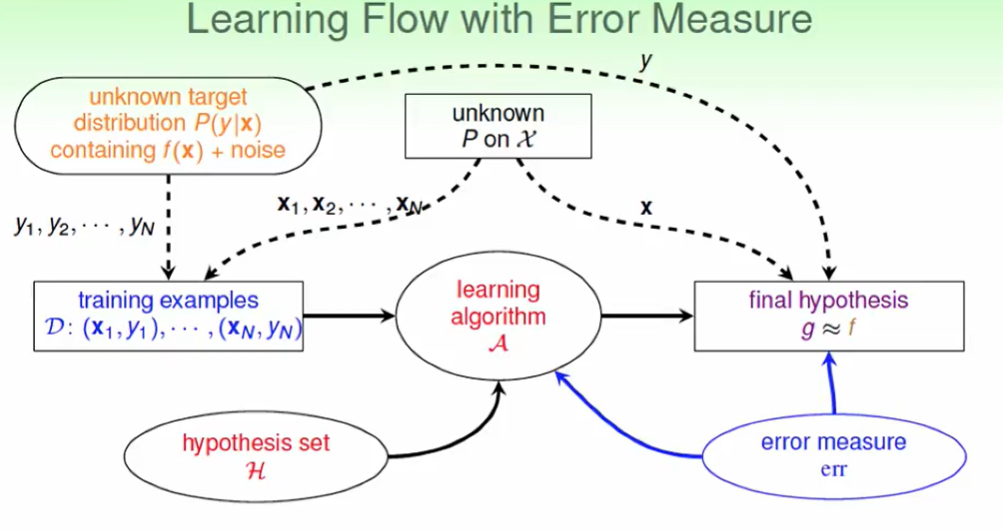
加上error measure 的leaning flow
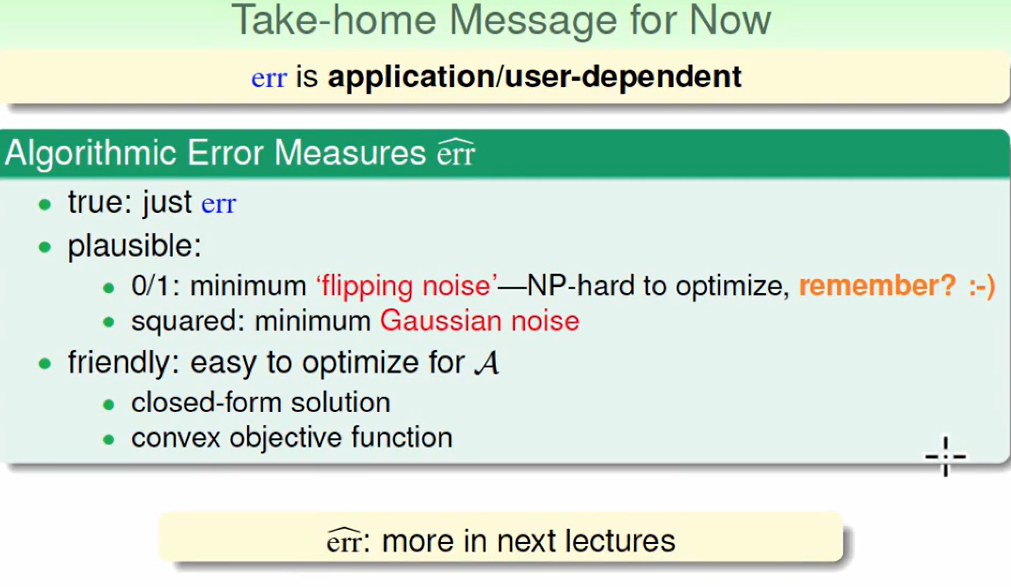
Algorithmic Error Measure
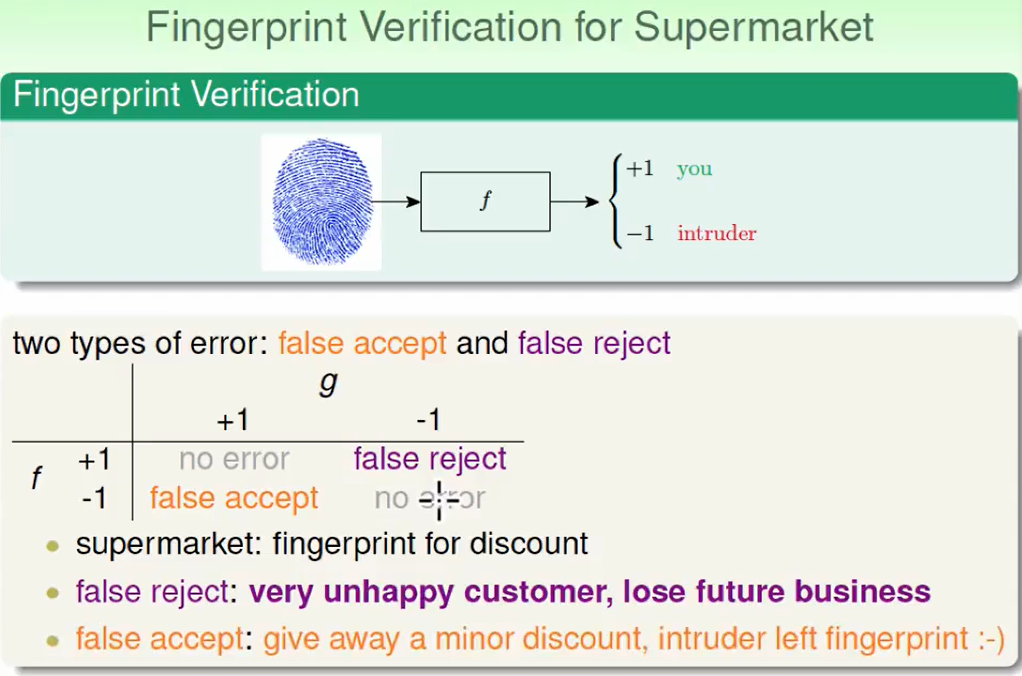
不同的错误方式:对于指纹系统其实是无所谓的,因为我们只需要知道可以不可以进去就OK了,而不在该进去的进不去,不该进去的进去了,这都是致命错误。
但是在超市应用时,两种错误会影响未来的生意:比如我该有折扣,但是因为系统错误没给我折扣,这回lose future business。但是我不该有折扣但是给了我折扣,超市在不亏钱的情况下还收获了跟好的口碑。所以这两者的错误权重不能看作相同的。
不妨设置为某个数倍的错误:
但这上面这个错误的衡量方法就一定是10吗,为什么不是100,因此我们在做系统时非专业的人很难给出这个倍数的大小。我们后面会更详细的讲下面这个错误度量方法。
Weighted Classification
现在我们改写了$E_{in}$的衡量方式,那么会影响我们之前所提到的 分类问题 吗?

首先是PLA:

PLA是无所谓的,因为他最后一定是没有错的,权重对他来说没什么用。
那么如果不是线性可分的呢?
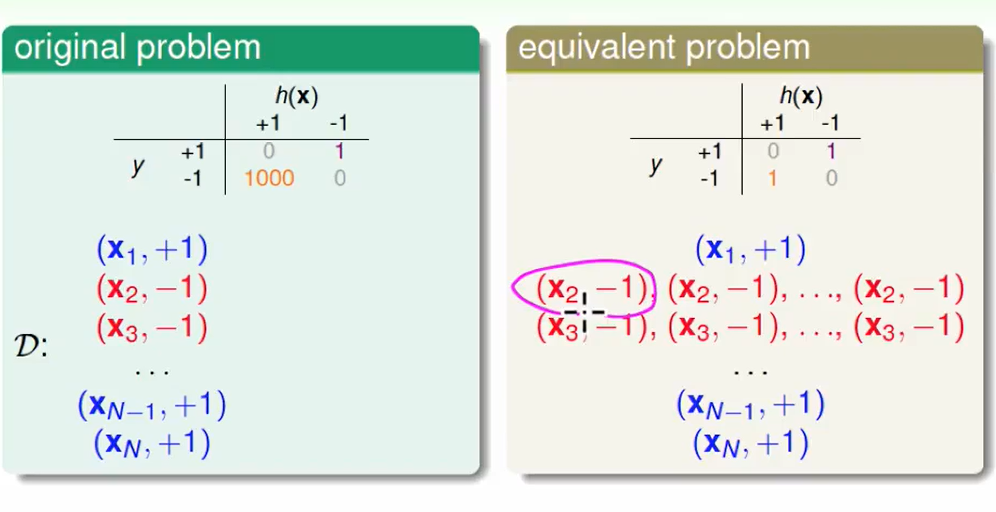
还是可以用pocket算法,从 原来的比错误个数 改为 比错误权重和,这样合理吗?

证明:我们可以这么改写错误的点,对于1000权重的错误,我们可以看作 1000个权重1的错误在同一点,因此这太符合pocket算法了。
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!