机器学习基石CH12:Nonlinear Transformation
CH12:Nonlinear Transformation
Quadratic Hypotheses(二次假设)
Linear Hypothesis
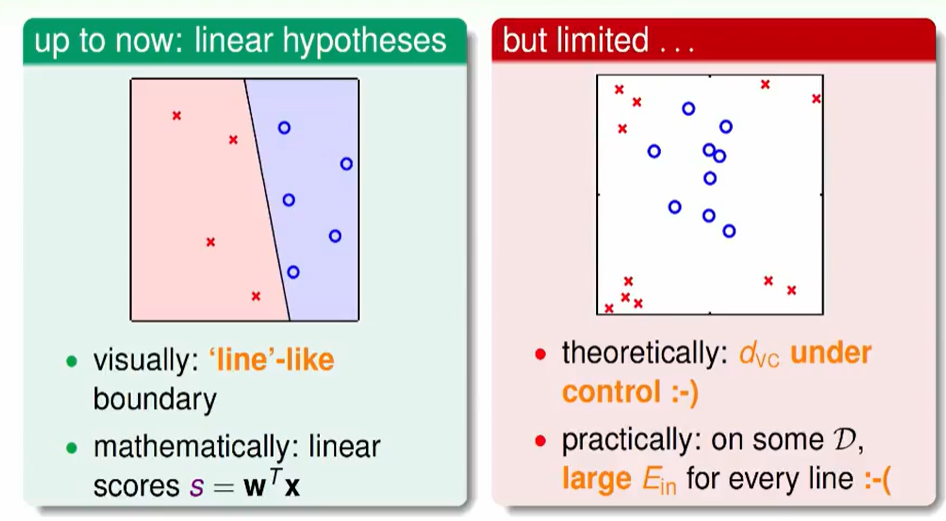
线性模型可以算一个分数,它最大的好处是$d_{VC}$ 可以被控制,当然线性模型在某些数据上每条线都做不到效果很好。
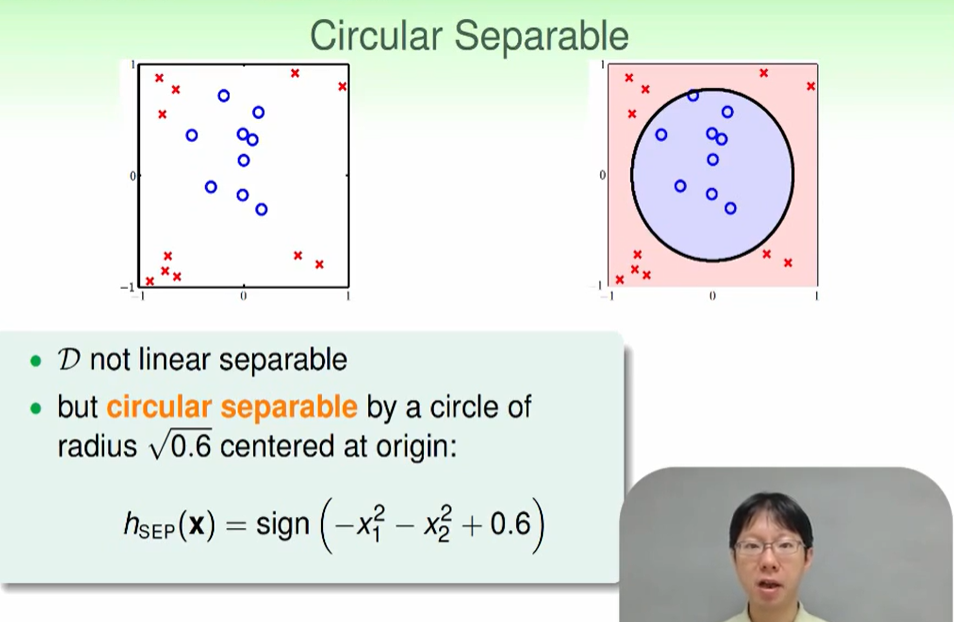
我们这里用一个圈就可以很好地进行分类。
那么我们可以设一个圆形的PLA,可是图形是千变万化的,我们不可能每个都设计出来一个PLA,那么我们可以系统化的设计一个。
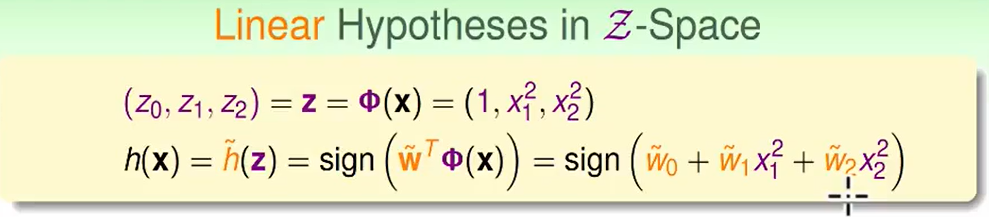
我们可以把式子化为:
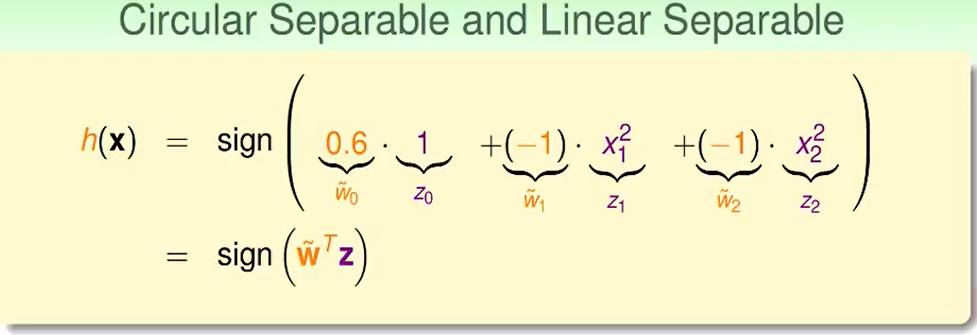
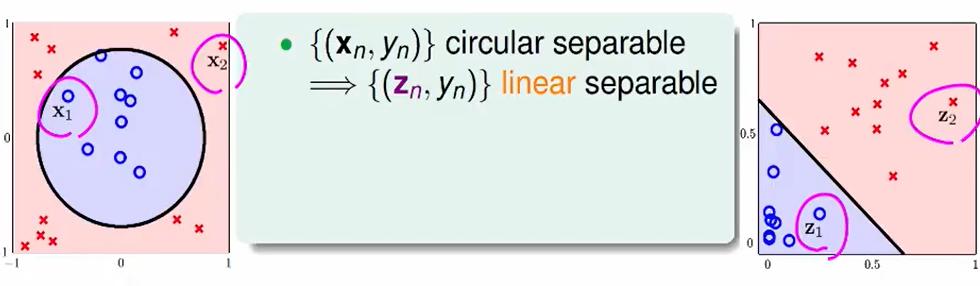
我们可以把$x_1$ 对应到右边的$x_1^2$,那么就想到于把以x为基地的左图转为以z为基底的右图。
惊喜的发现,我们又把问题转化到了线性的问题。
不同的w赋值可以代表不同的model,这是一个很好的系统性的总结。
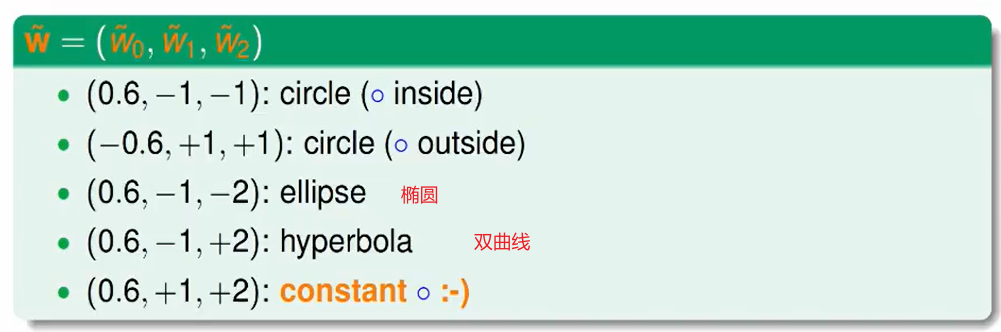
那么什么样的x图像都可以用z表示吗?
当然不是,如果我们细心会发新$h(x)=sign(w_0+w_1x_1^2+w_2x_2^2)$ 没用关于x的一次项,也就是说这个圆形是不可以平移的。
因此只有一部分特殊可以利用这个系统:

我们想要扩展到任意图形:
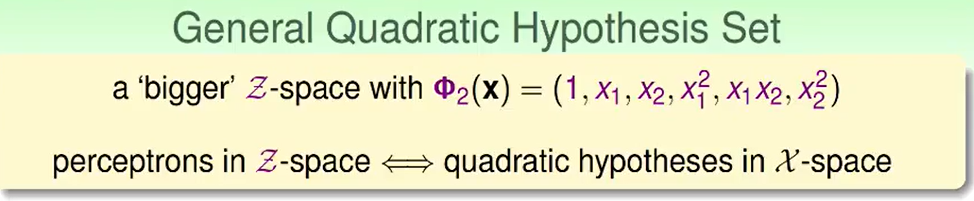
那我们就加上一次项。
Nonlinear Transform
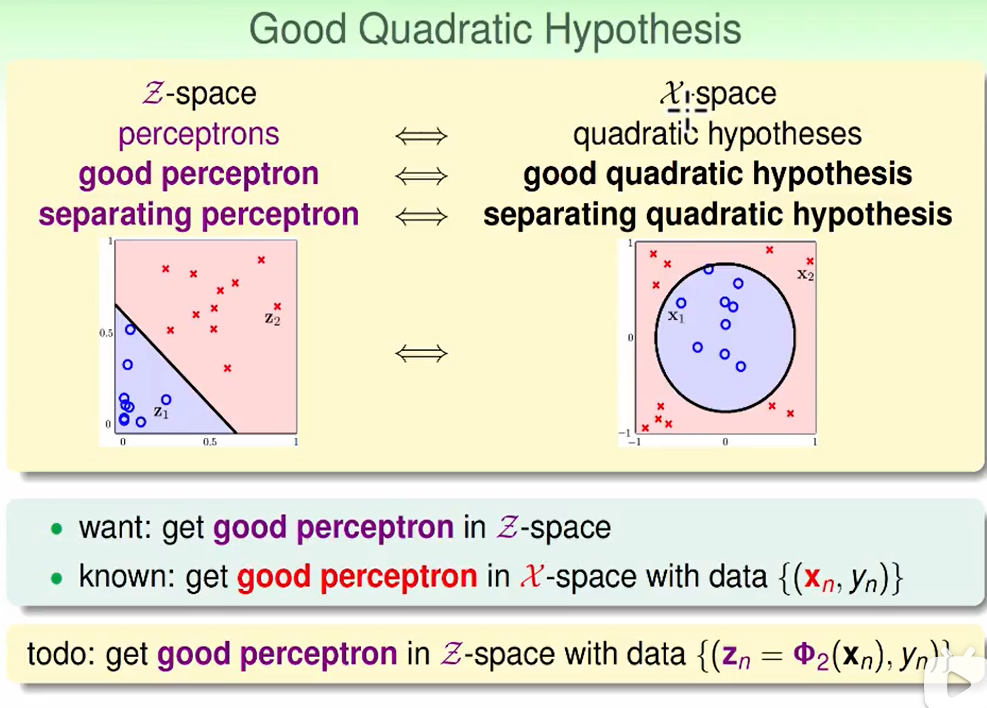
因此我们想这么做一个过程:
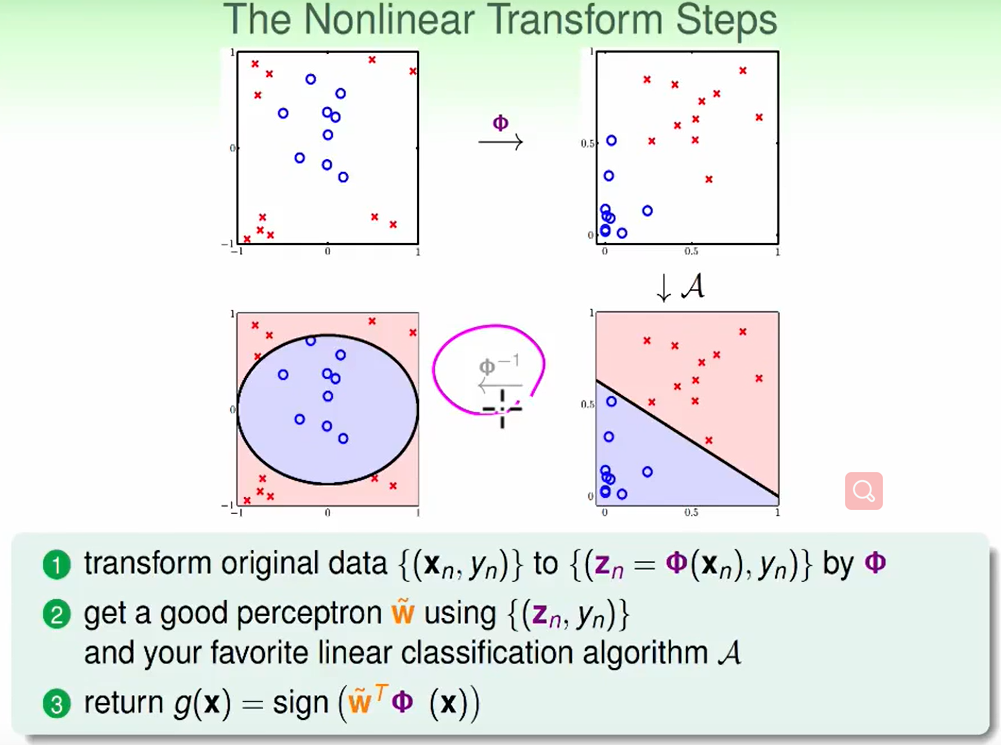
最后一个反运算$\phi ^{-1}$虽然不一定成立,但一般不会影响我们的结果,因为我们早早建立了每个点在新的以z为基地的坐标系下的映射坐标是什么,我们既然已经算出来了下图: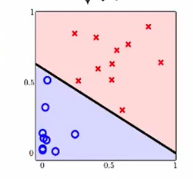
我们可以直接去找他对应的点是什么,无需做反变换。图中这么表示这是为了理解。
这个转化做完所有学的线性模型都可以用了。
但是这么做有没有什么代价呢?
Price of Nonlinear Transform
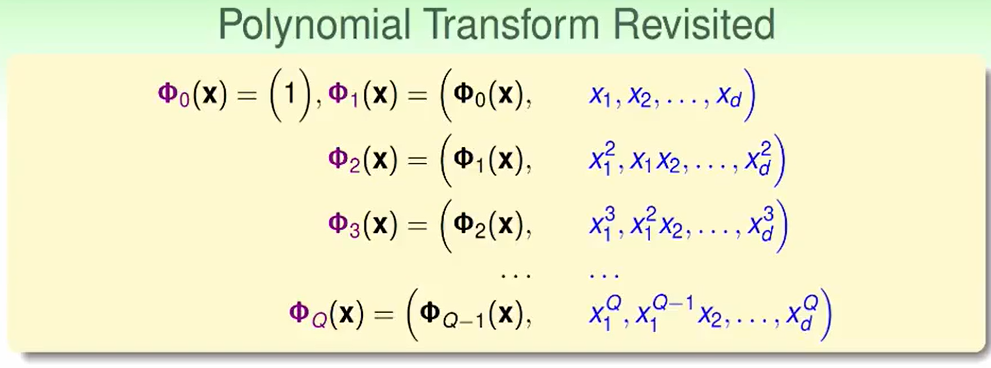
如果是一个Q次的多项式:
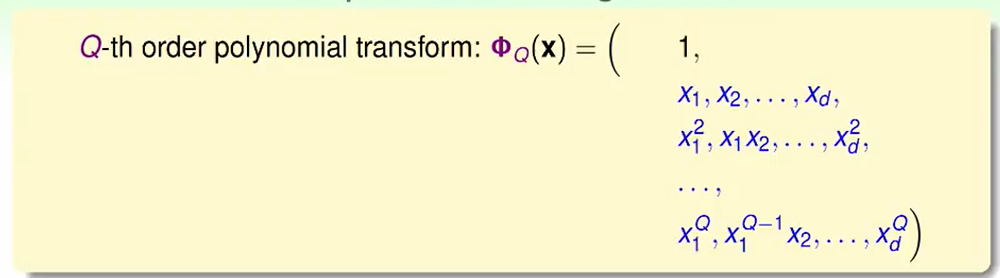
那么我们需要多少项来表示呢?
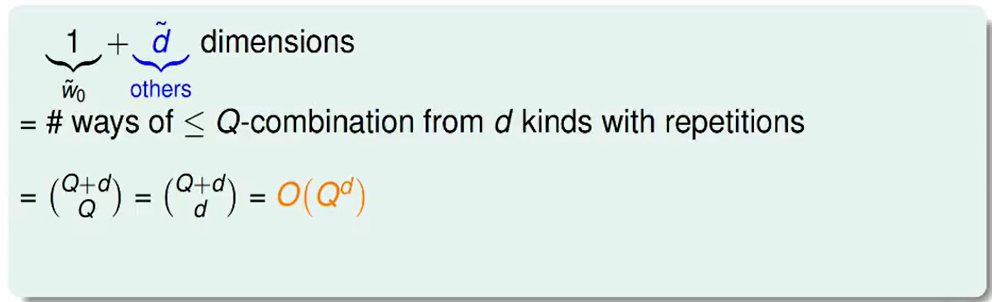
这个量级大概是$O(Q^d)$,即w大概要这么多项,这个w大概就是$d_{VC}$。
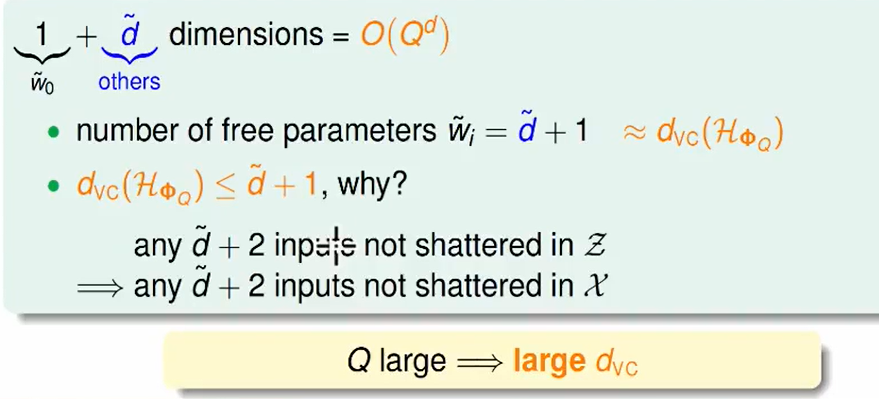
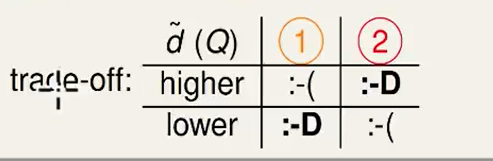
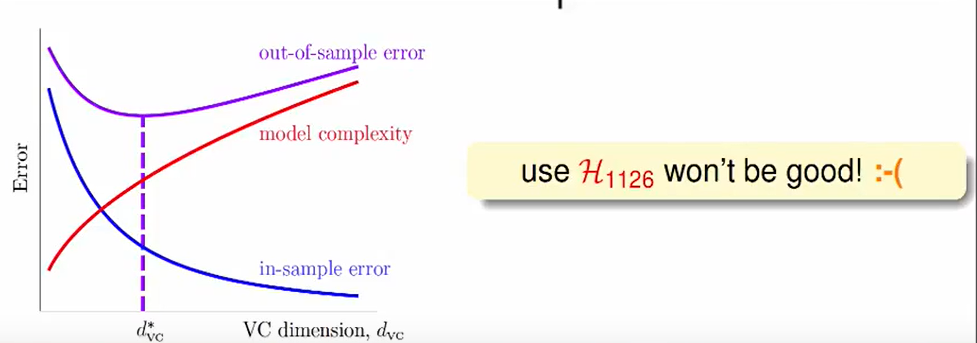
- 所以Q很大时,即用了一个高次的函数来划分类别,$d{VC}$就会很大,这样导致了$E{in}$和$E_{out}$差距就很大了,但是这种效果往往在训练的数据集上表现得很好。
- 反之,如果我们选一个很简单的低次函数来划分,$d{VC}$小一些,虽然$E{in}$和$E_{out}$比较接近了,当然这会使得我们的训练效果很差。
这是一个机器学习中很重要的trade-off(权衡)
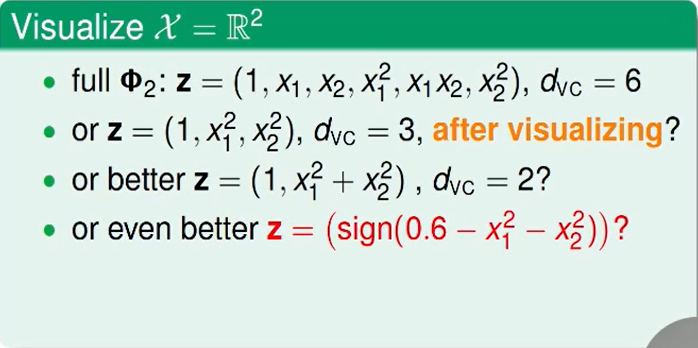
我们看上图可以发现,我们最后甚至提出了一个$d_{VC}=1$的方法,真是太好了。
但其实我们仔细想想,能提出这样一个想法,是因为你看到了这个数据图:
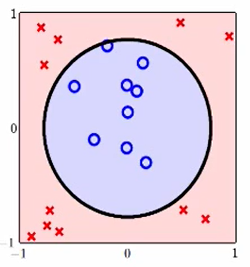
你看到长得像圆形,没有偏离原点,所以你说我们不需要
这种的变换。
那如果是一个超高维的数据,你分类就不可能看到数据情况了,你也想象不到高维体的样子,所以你只能老老实实的用$d_{VC}$大一些的方法。而我们直接提出的
这种方式,是经过人human learning 学到的,不是machine leaning学到的。
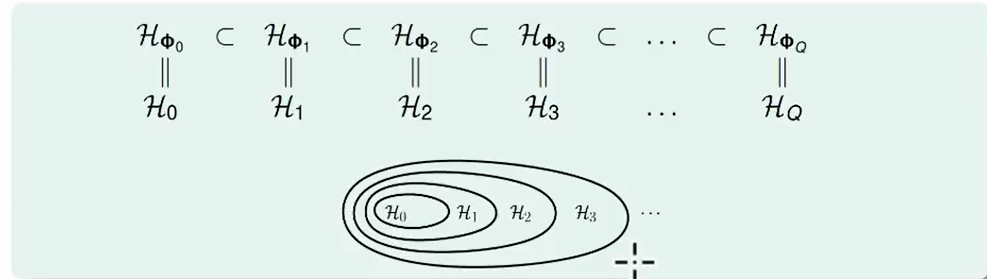
Structed Hypothesis Sets
我们转换到新的坐标下,新坐标下的Hypothesis肯定是有包含关系的,如下图。
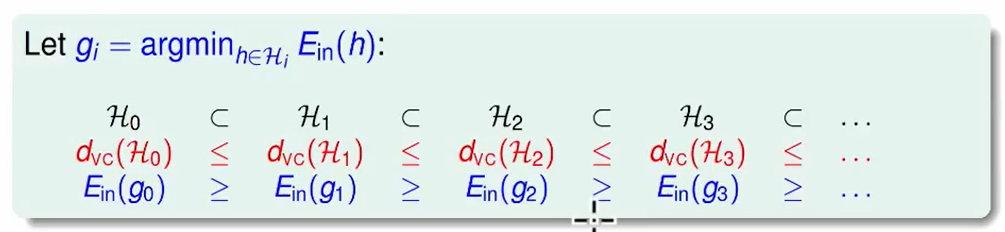
同理我们不难推理到$E_{in}$
从上图我们可以看出转换到一个很大的$d_{VC}$,并不是很好。
比较安全的做法是:从$H1$ 开始一个一个增加 ,直到$H_t$计算出的$E{in}(g_t)$足够好
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!