机器学习技法CH12:Neural Network
CH12:Neural Network
Motivation
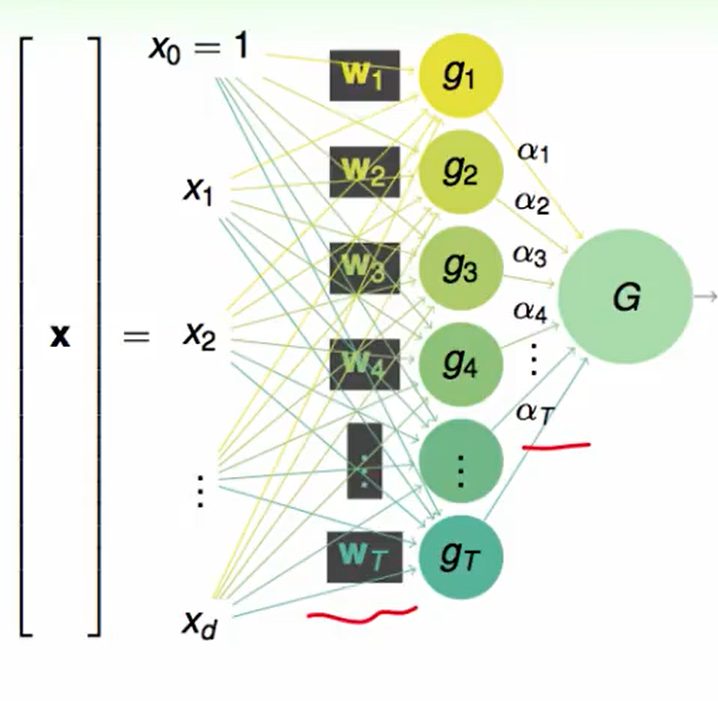
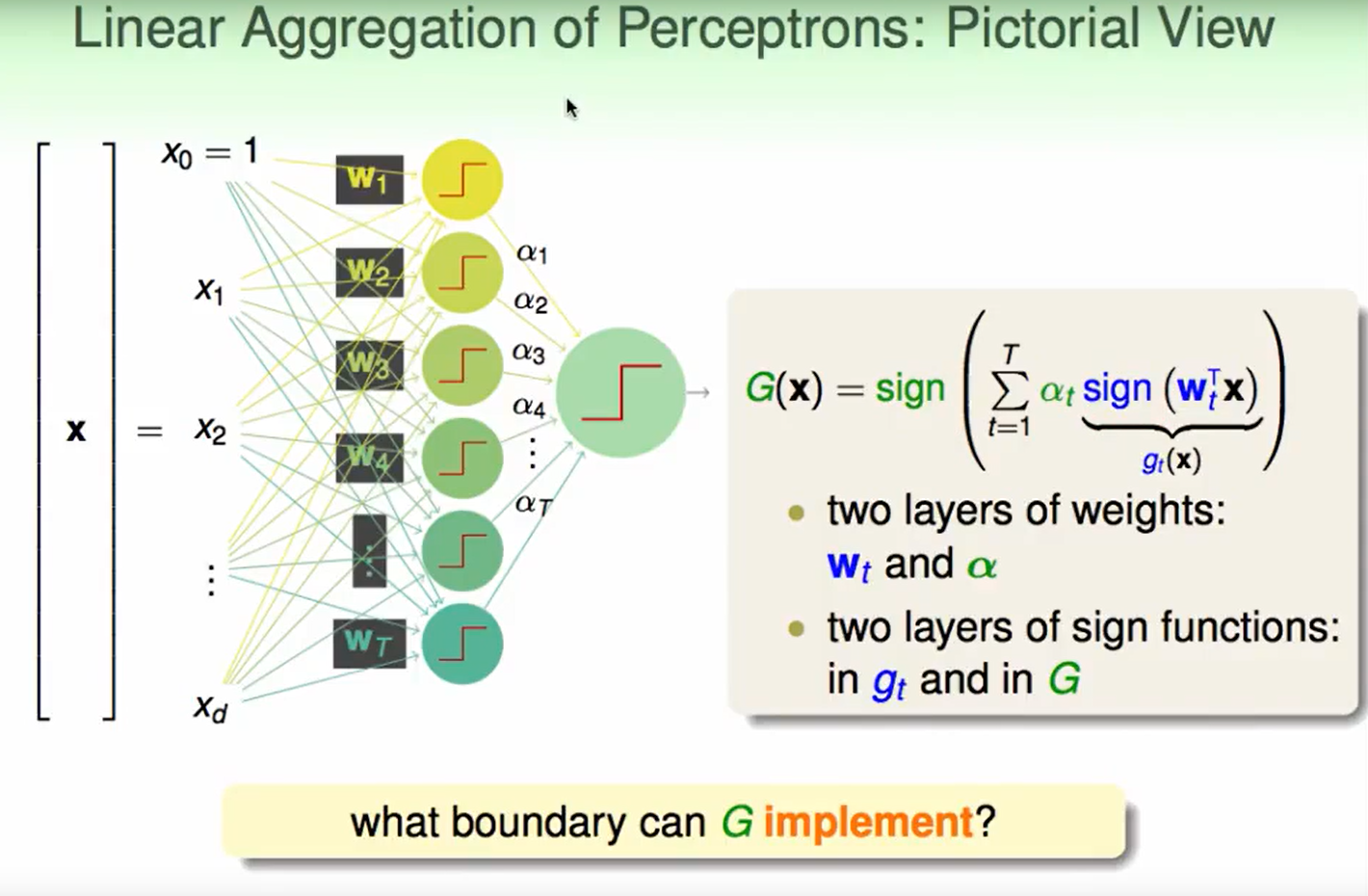
我们可以自由决定$w$和$\alpha$ .
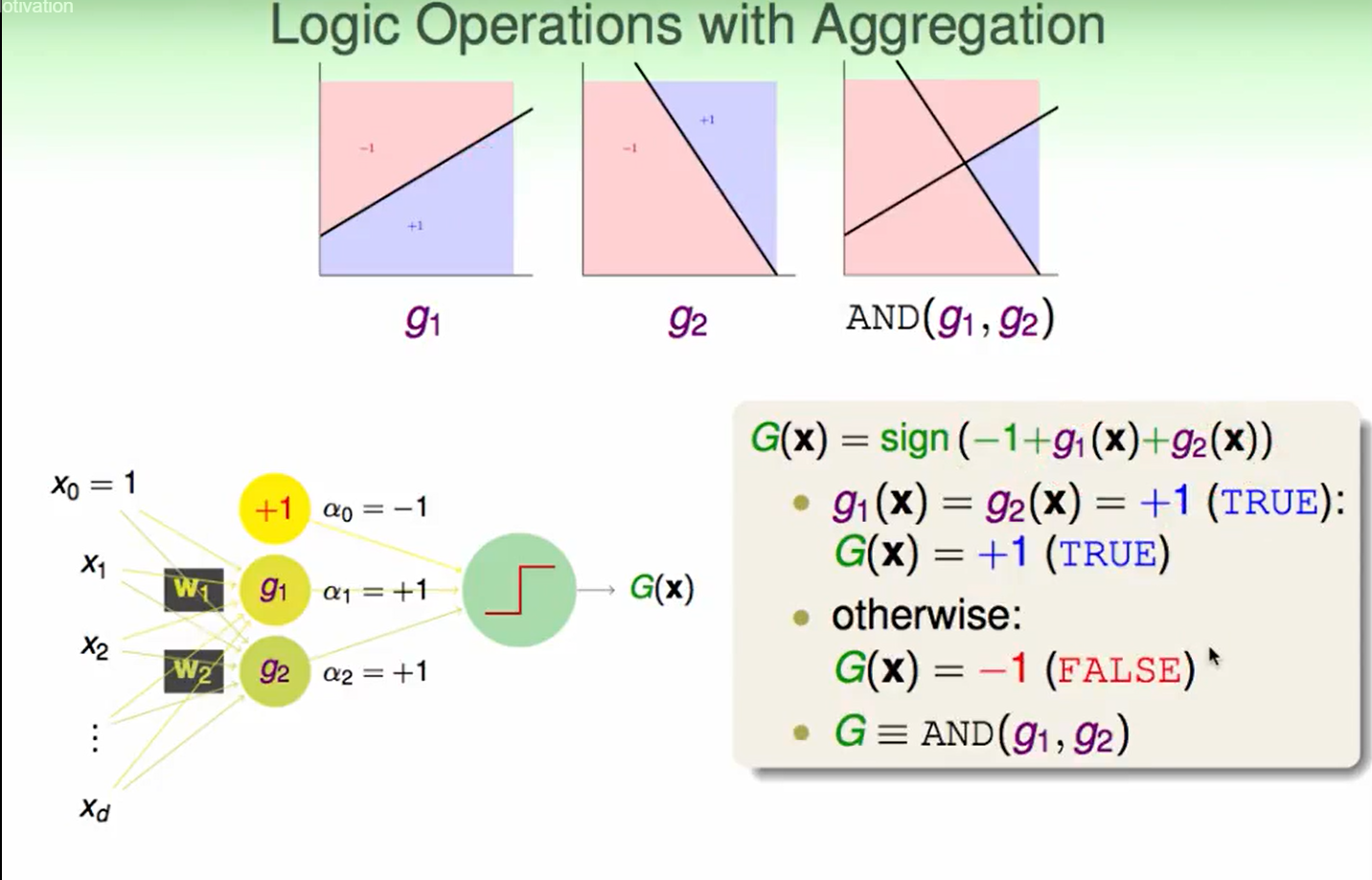
首先这种aggregation操作可以做到logic operation(逻辑运算):
AND运算:
我们的这种aggregation of Perceptron是很复杂度 :
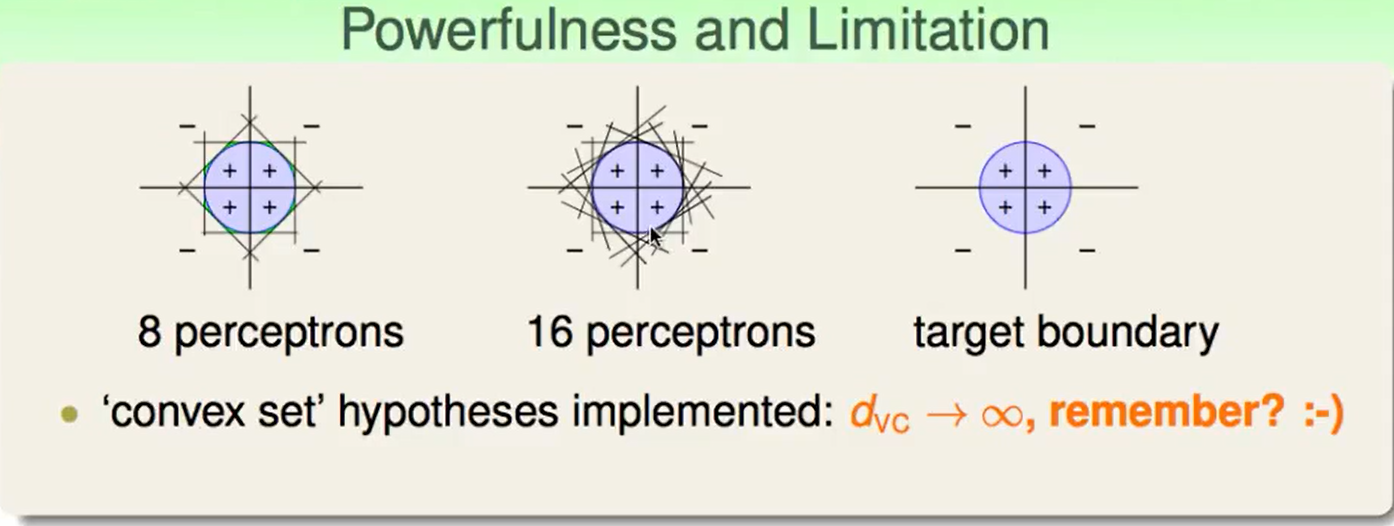
上图发现,我们用足够多的perceptron就可以得到一个近似于target boundary的结果,因此它是一种能力很强的组合方法。当然这也意味着很容易overfit。
当然这种方法也有一些局限(Limitation):
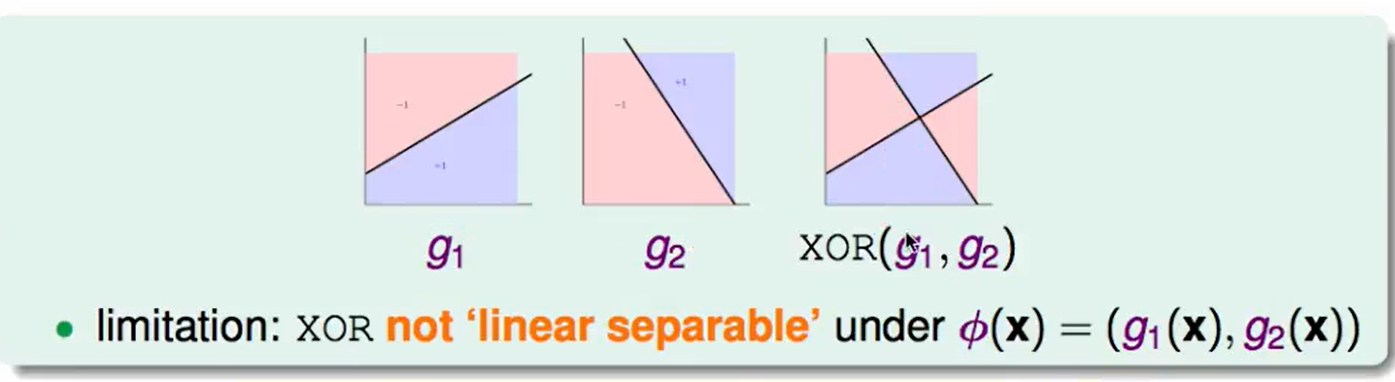
由于异或是非线性可分的,因此这种方法不能直接处理。
那可以先考虑做一次feature transform,那么也就是我要做两层转换。

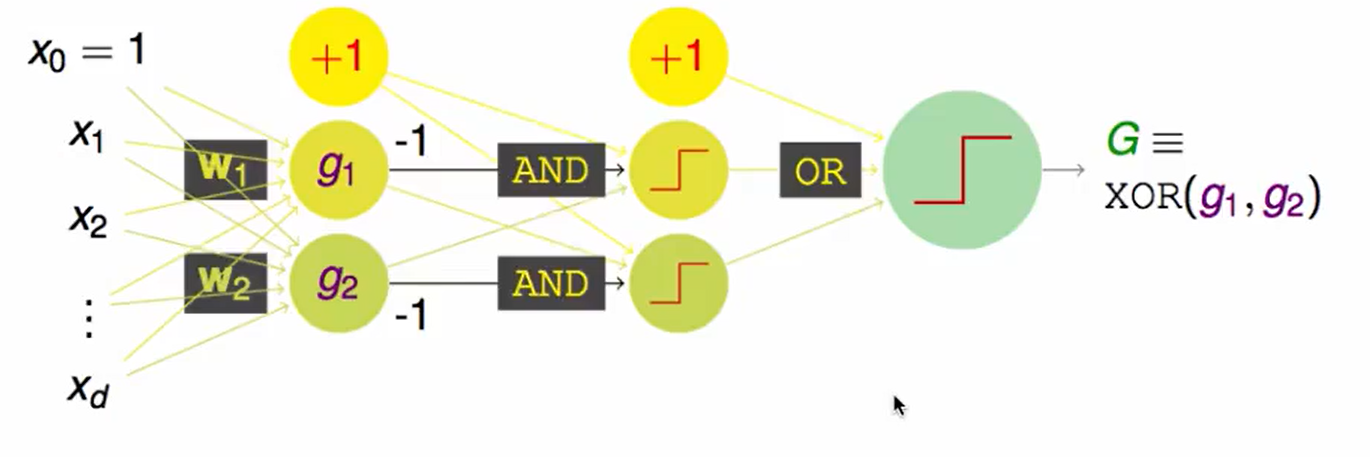
多层的perceptron就是basic Neural Network。
Neural Network Hypothesis
输出可以看作一个多层模型嵌套后的线性组合:$s=w^T\phi^{(1)}(\phi^{(2)}(\phi^{(3)}(…)))$
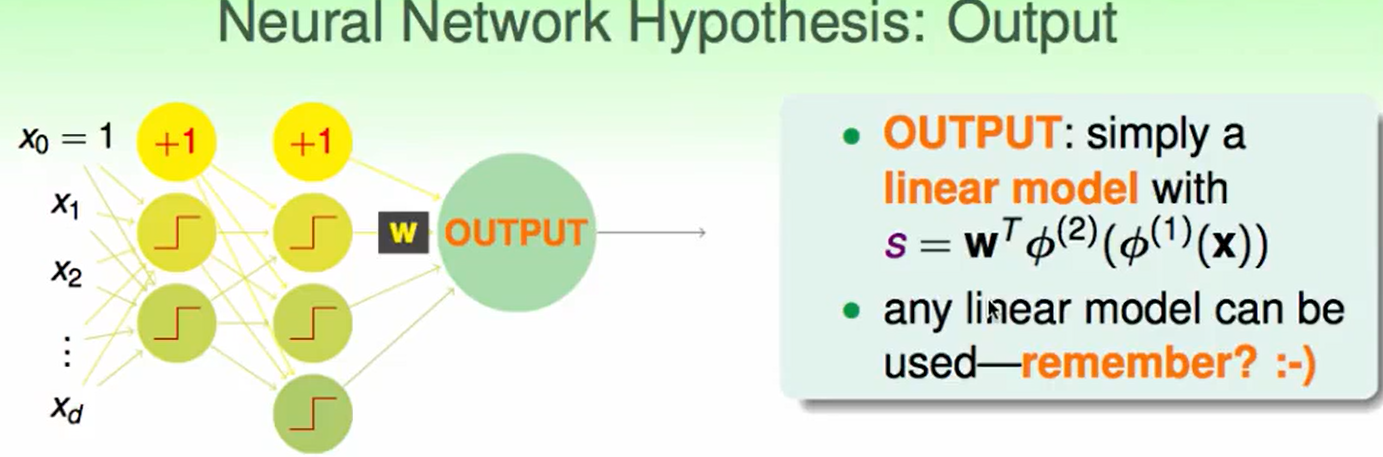
s可以做下面这三种操作:
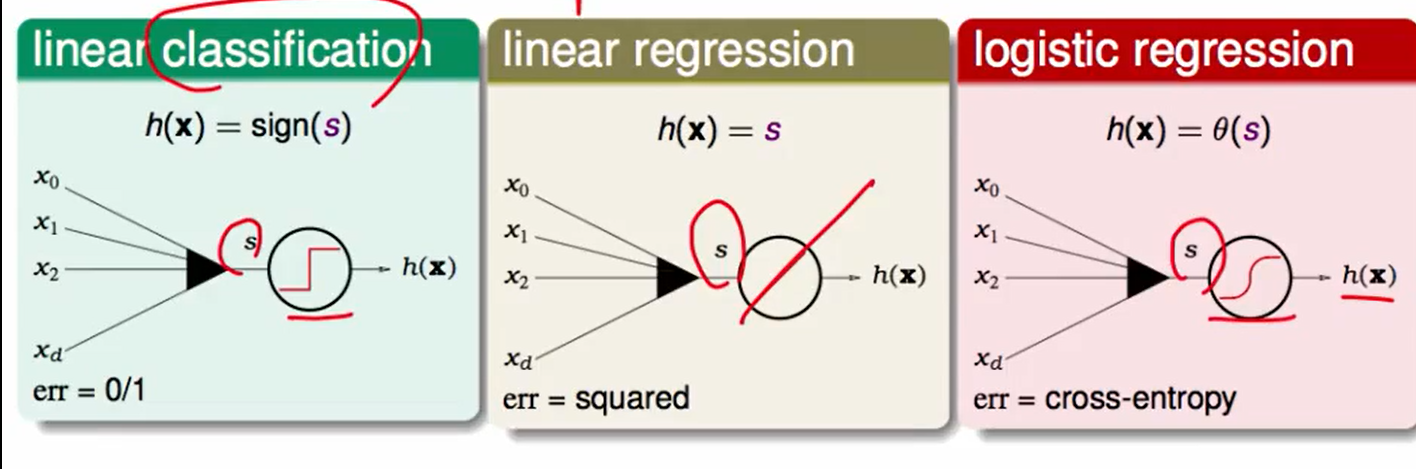
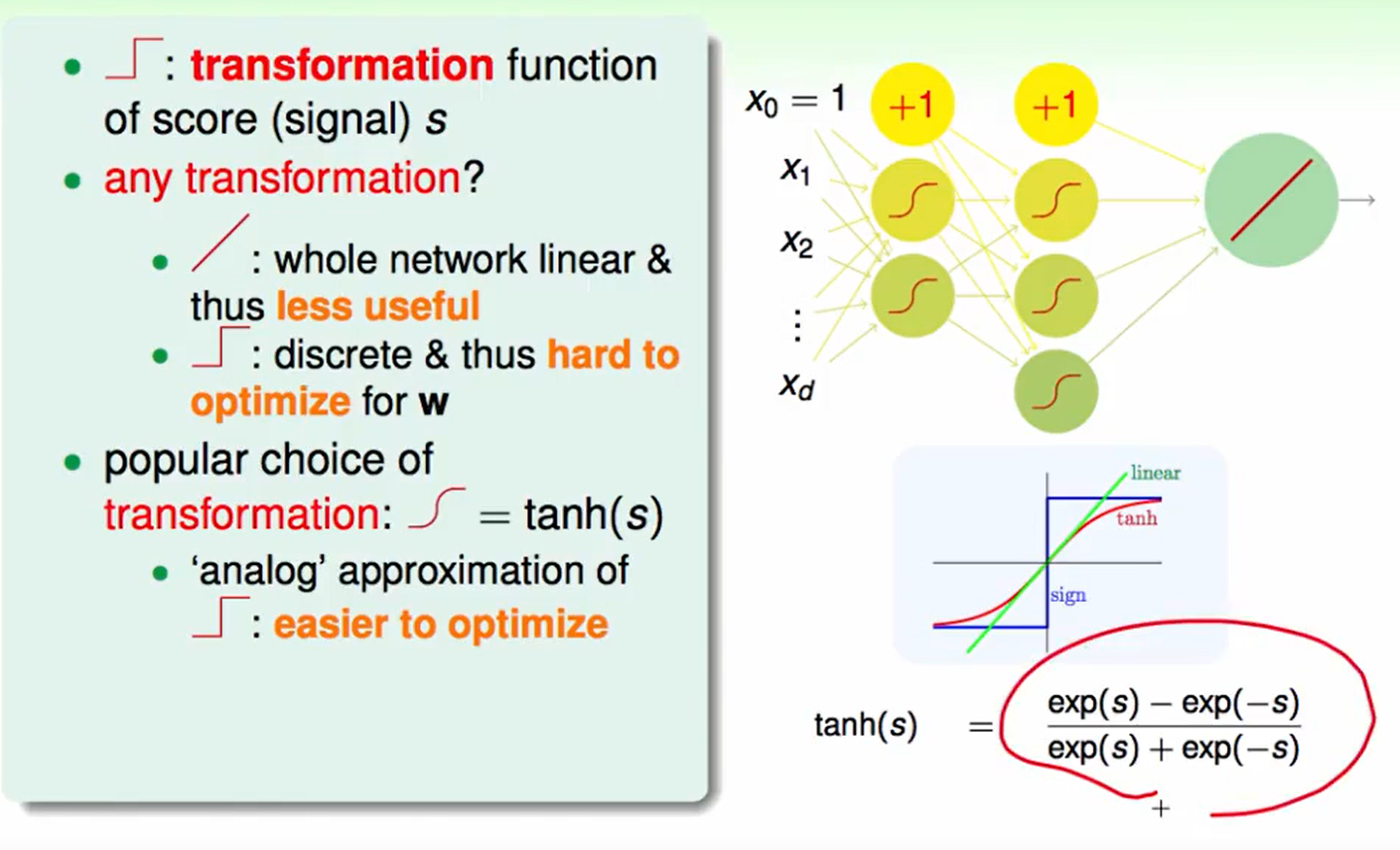
我们之前一直都讨论的神经元处理都是sign阶梯函数来处理的,但是这种很难最优化$w$,而若全部换成线性的,其实也没什么作用,因为线性的组合还是线性的,这样做是没有意义的。
因此考虑$tanh(s)$这个函数来处理,他在近似原点的地方符合linear,远离原点的地方符合sign.
同时注意到,$tanh(s)$可以化简为:$tanh(s) = 2\theta(2s)-1$
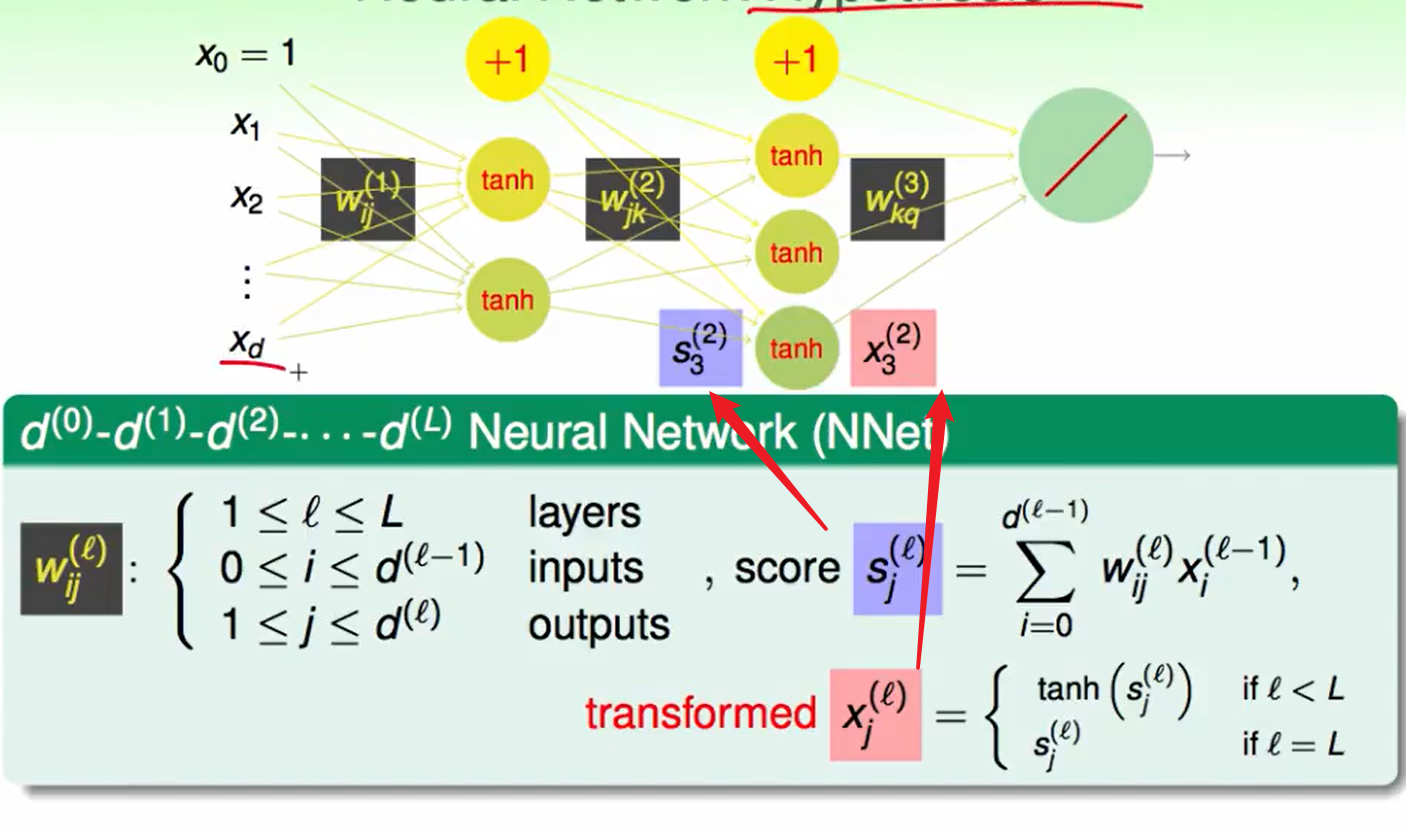
那么把这个hypothesis改进后:
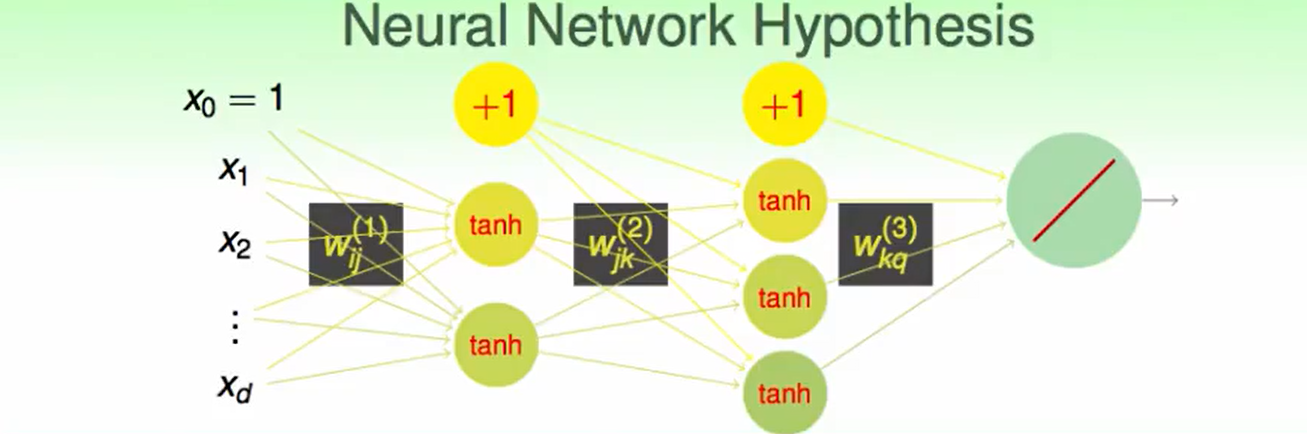
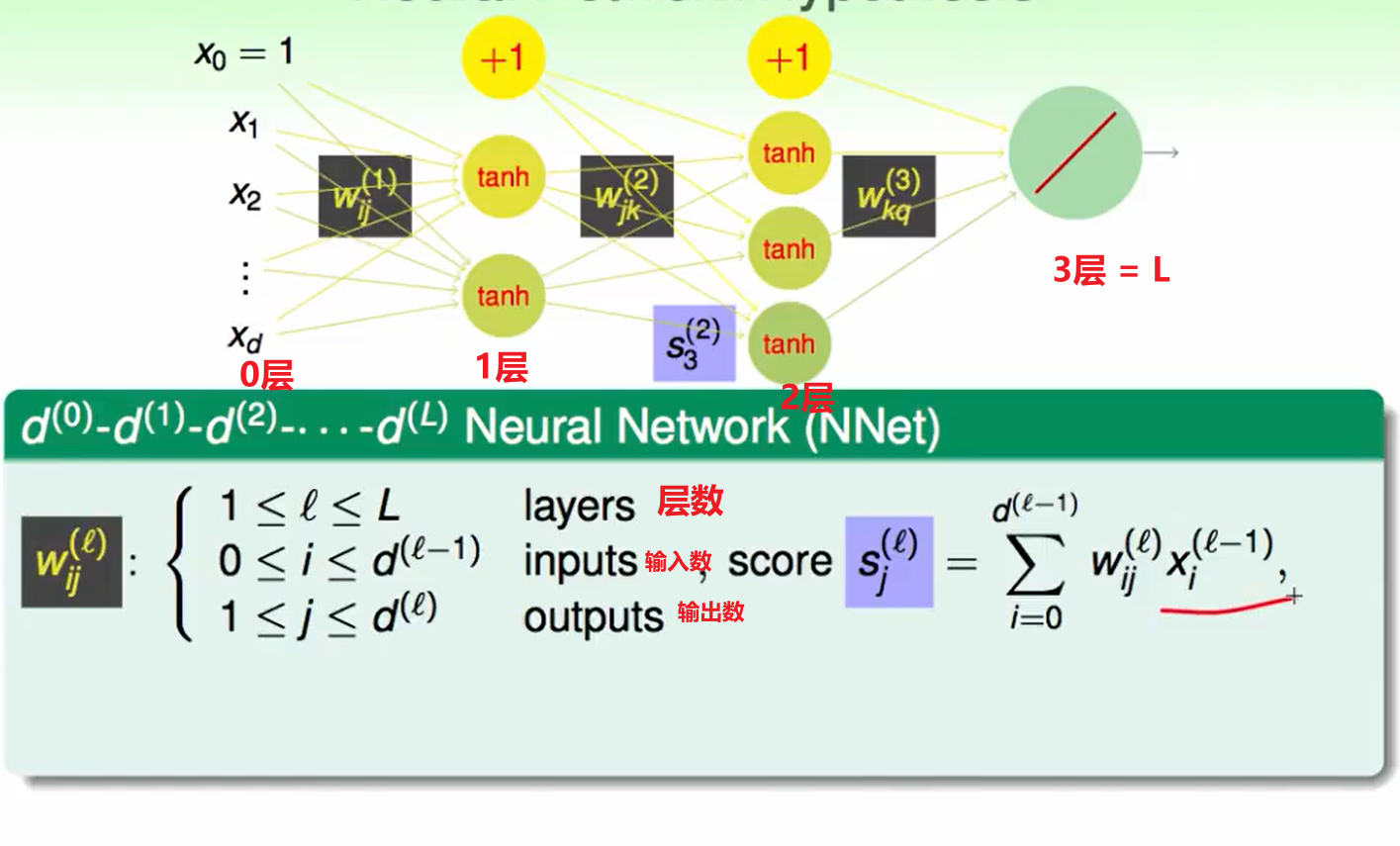
其中输入得第0号是输入的常数项。
我们提出了两个概念:一个是分数score,另一个是transformed转换后的输入:
Neural Work Learning
我们可以写成square error的形式:

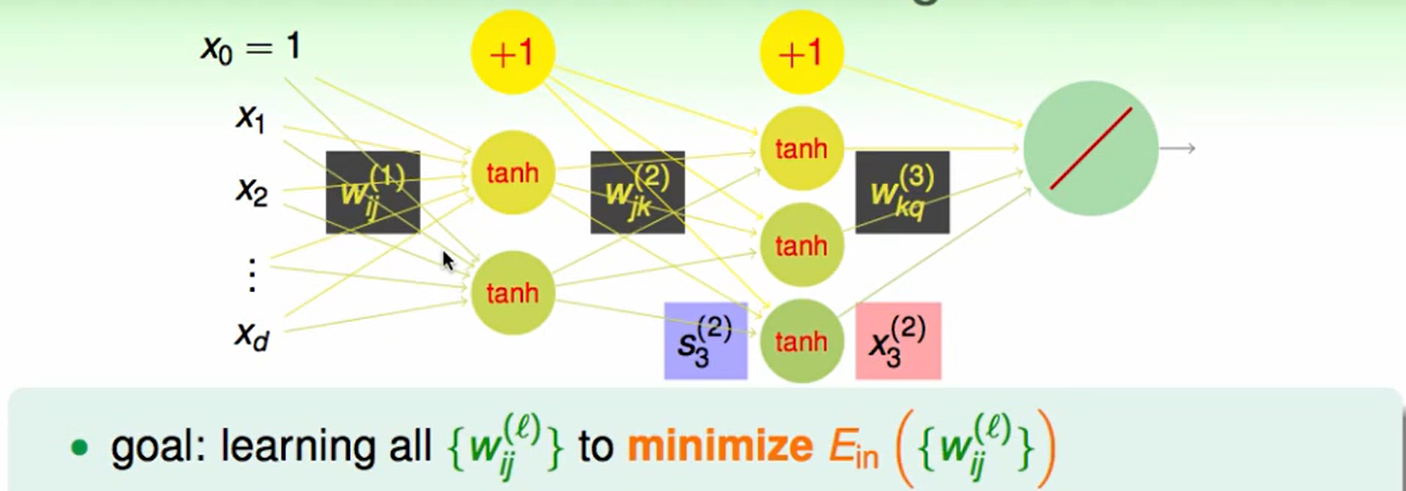
但是这样的效率很低,因此目标是:


我们首先来算最后一层的,即第$L$层。
最后一层的输出是1的,那么$w^{(L)}$的应该是一个大小为$d^{(L-1)}*1$的矩阵:

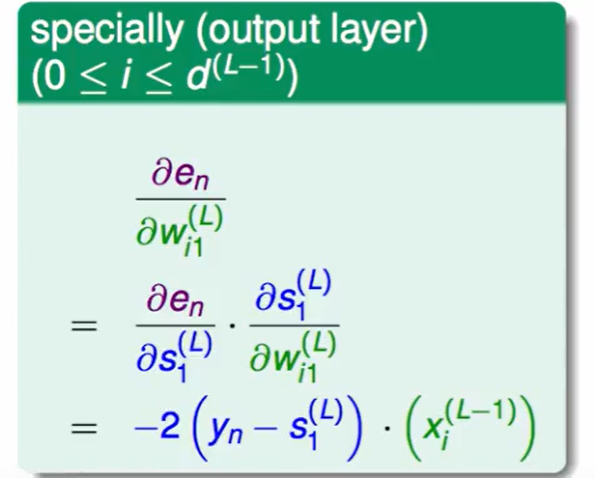
那么最后一层可以很方便的算出来。
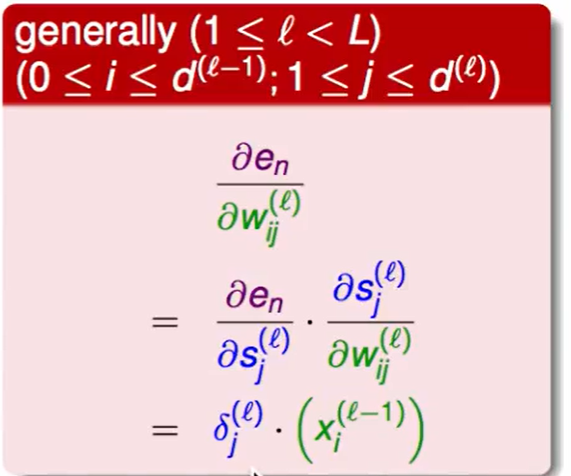
如果不是最后一层呢?
同样的方法我们应用到这里,但是对于$ \frac{\part e_n}{\part s_j^{(l)}}$,我们很难计算,因此我们选择用暂时不处理,并用$\delta_j^{(l)}$代替。
下面我们来处理这个难搞的偏微分:
一个$e_n$是$s_j^{(l)}$经多次变化才会得到的,如图:
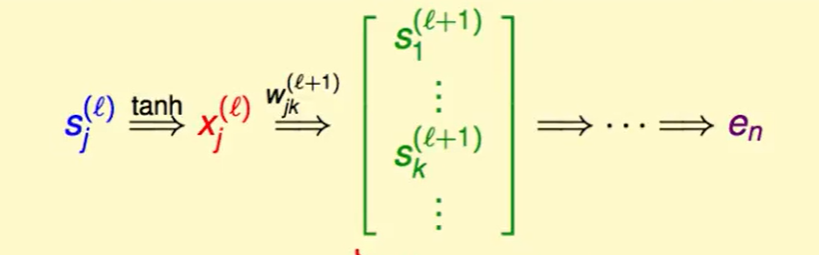
和之前一样,我们用连锁律来一步一步倒推回去:

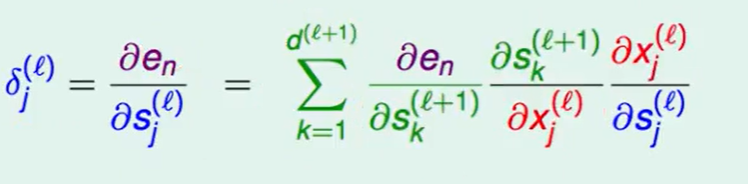
这里有个$\Sigma$的原因是因为$s$是一个高维的的数据,所以我们需要对 每一个都求偏微分加在一起。
最后写出下式:
继续推到,第一项绿色的就是我们定义的$\delta$ ,红色项推导:根据上面的转换图可以看出$sk^{(l+1)}$是由$x_j^{(l)}*w{jk}^{(l+1)}$得到,故对偏微分就是$w_{jk}^{(l+1)}$.
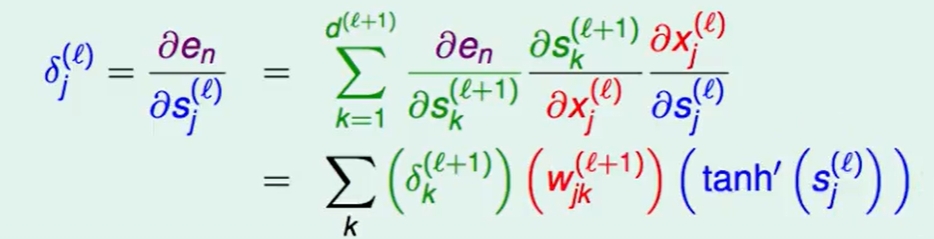
现在我们有了递推式$l$层可以通过$l+1$层推出。
那么我们就可以提出这个新的算法Backpropagation Algorithm反向传播算法:
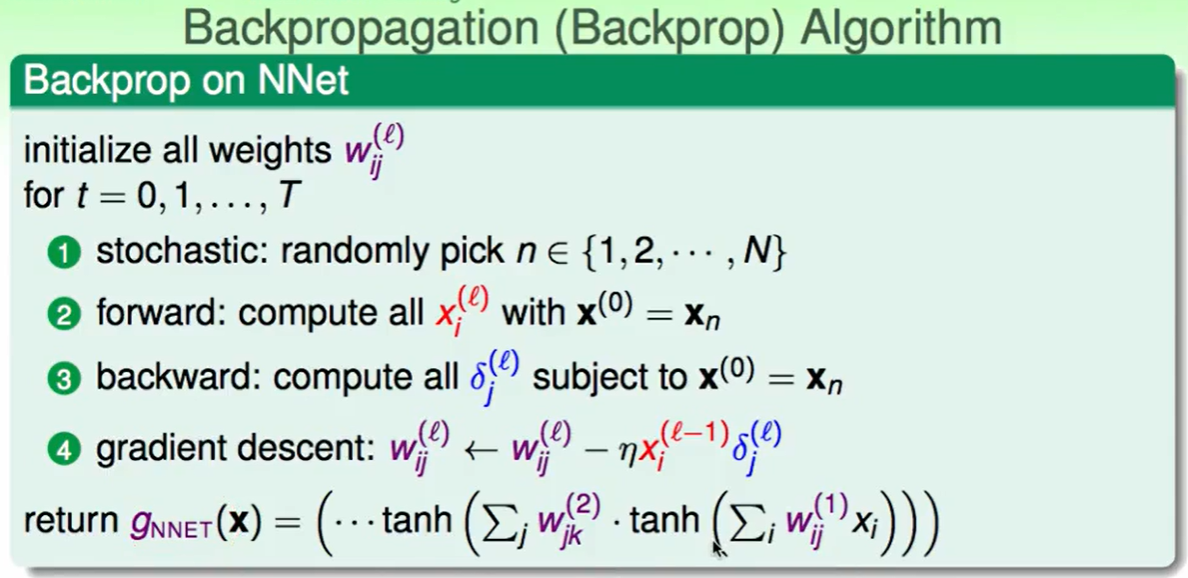
实际应用中 ,对于一次运算④,我们回把①到③做多次去求得一个平均值,即$average(xi^{(l-1)}\delta{j}^{(l)})$。同时注意到这种①到③运算是可以并行的运算的,这就是大大加快了效率。
我们称这种多次运算取平均的方法叫做mini-batch
Optimization and Regularization
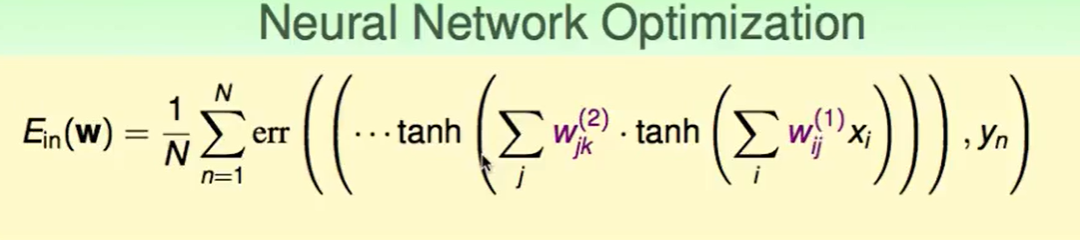
我们写出$E_{in}$函数,发现下面这几个问题:

第一,这个是一个非凸的函数,因此会有很多个山谷,因此我们并不是很容易中找到一个全局最小化的地方,我们所用的GD/SGD 通过反向传播算法得到的也只是一个局部的最小值。
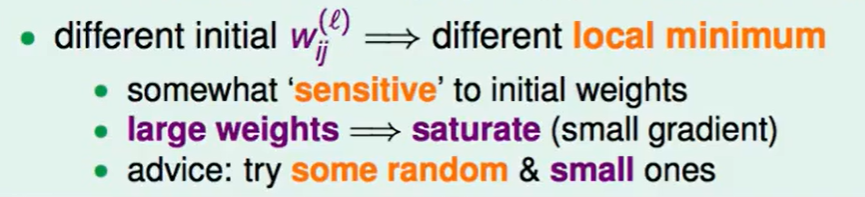
第二,由于有多个山谷,权重$w$的不同初始化的值会导致不同的局部最小值,坦白来说,并没有什么最好的方法来最优的初始化这个$w$,但是我们可以通过一些技巧来做到一个还算不错的结果。
- 首先如果权重$w$很大,那么做$tanh()$时会导致梯度非常小,为什么呢?$tanh()$在$w$非常大的时候函数曲线已经接近平的了,这样我们每次只会走非常小的一步,这样就在有限的次数里可能不会走到最小的谷底。
- 因此给出的建议是:权重选择要随机一些,同时权重尽量一些。
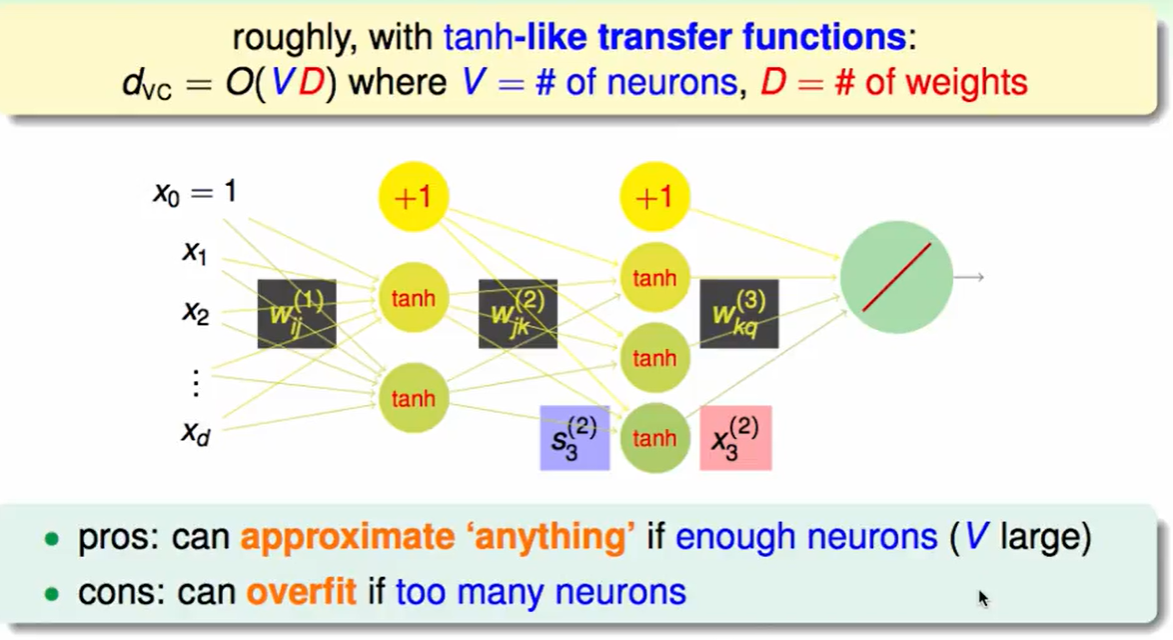
那么这个算法在使用tanh做transfer function的情况下的复杂度,用VC dimension来衡量大概是$O(VD)$。 他可以来做许多事情如果你的神经元足够多。但是同样也要小心这样带来的overfitting。

对于overfitting,我们可以做Regularization:
我们不难想到一种basic choice就是 做L2正则化,限制w的权重平方和。

但是这么做没什么意义,好比一个近似等比例的缩小:

比如原来的权重是8现在就是4,原来是10现在就是6,这种放缩并不会帮助你解绝overfit。
L2正则化本质上没有帮我们解决降低$d_{VC}$的问题,也就是说没有帮我们把一些w变成0.

我们现在不妨考虑L1正则化:

但是这有一些问题,就是带着绝对值不好微分,backprop是要求微分的。
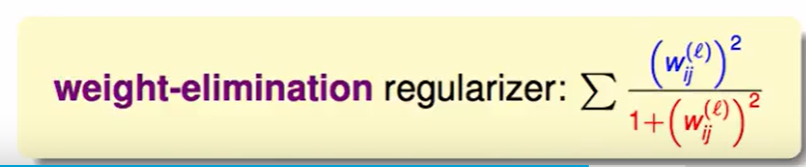
还有一种比较常用的方法就是使用weight-elimination regularizer。weight-elimination regularizer类似于L2 regularizer,只不过是在L2 regularizer上做了尺度的缩小,这样能使large weight和small weight都能得到同等程度的缩小,从而让更多权重最终为零。weight-elimination regularizer的表达式如下:
还有一种有趣的正则化方法:early stopping
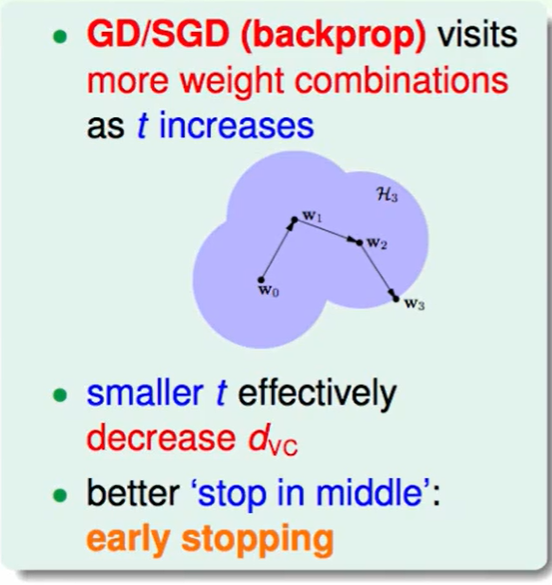
我们每次的GD只是观察一个小的范围内并作出选择,随着我们迭代次数变多,也就是时间变长,我们看到的会更多也就会导致overfit,因此我们运行的时间越短,那么$d_{VC}$也会越小。
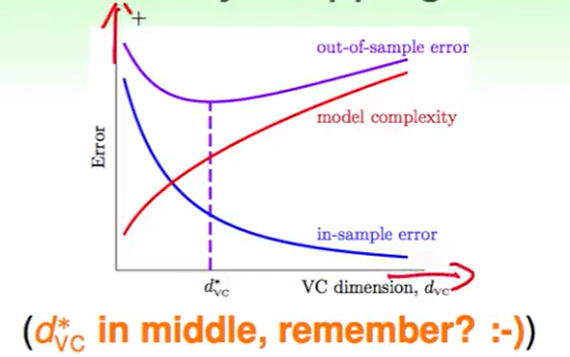
因此我们选一个适合的时间,得到一个适合的$d_{VC}$,那么我们就可以获得一个不错的结果。
下面是一个运行时间t和错误率 的关系的图:
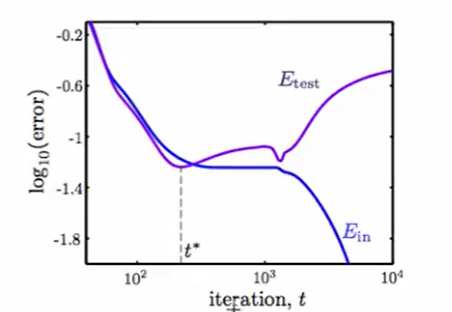
那么也就是说我们还要选择一个参数:时间$t$
怎么做呢? Validation!
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!