强化学习纲要Ch2-马尔可夫决策过程(MDP)—上
马尔可夫决策过程(MDP)—下
本次课的plan list:
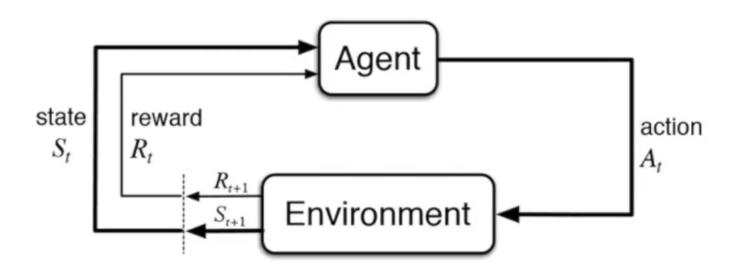
环境和agent交互的过程可以通过马尔科夫决策过程来表示。
马尔可夫决策过程可以解决许多实际问题,因此这是RL种的一个基本框架。
一般来说MDP的环境是fully observable的,但其实partically observable也是可以通过MDP来解决的。
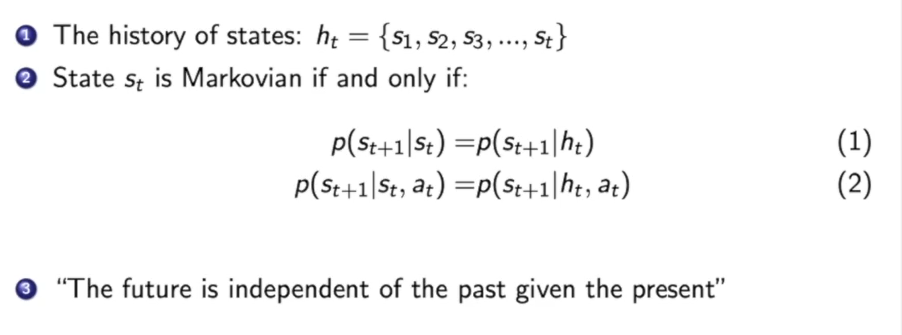
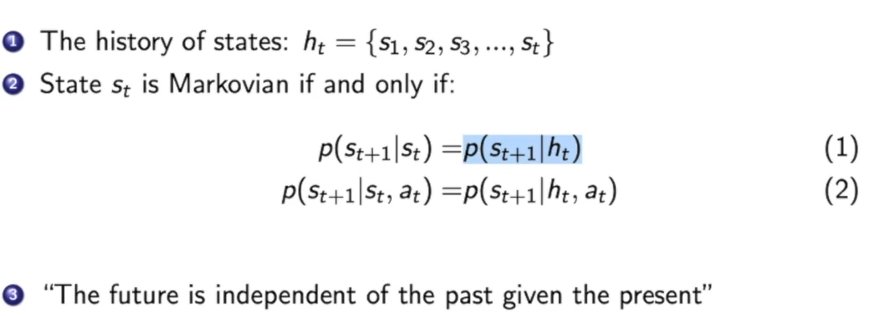
如果一个状态转移是符合马尔可夫的,那么说明当前的状态只与上一时刻有关。
即:
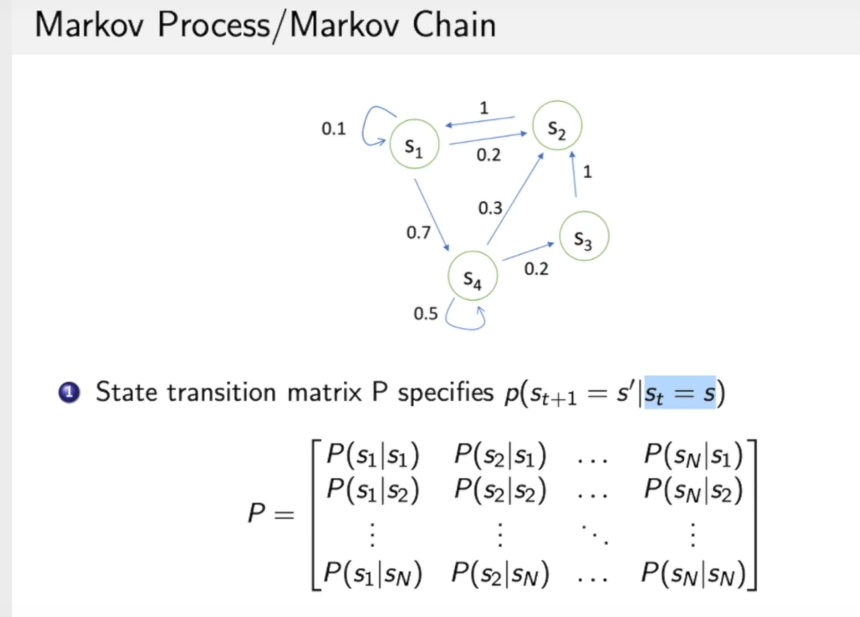
上图可以看作:在当前状态转移到其他的概率,我们可以用一个状态转移矩阵来表示,可以看作是一个条件概率,即在当前状态下到达其他状态的概率。
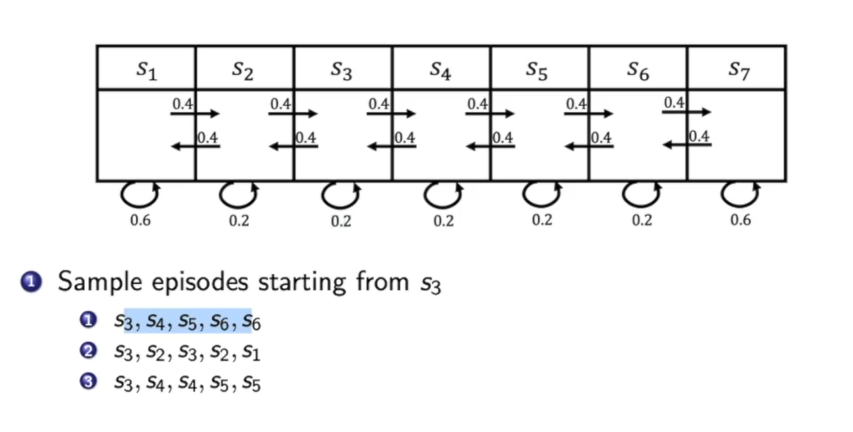
这个图可以看作马尔可夫链,一个例子:
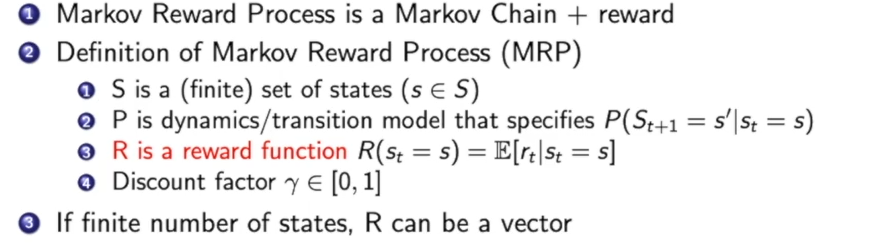
马尔可夫奖励过程(Markov Reward Process):
马尔可夫奖励过程 = 马尔可夫链 + 奖励函数
现在我们给上述例子中的马尔可夫链加上奖励:
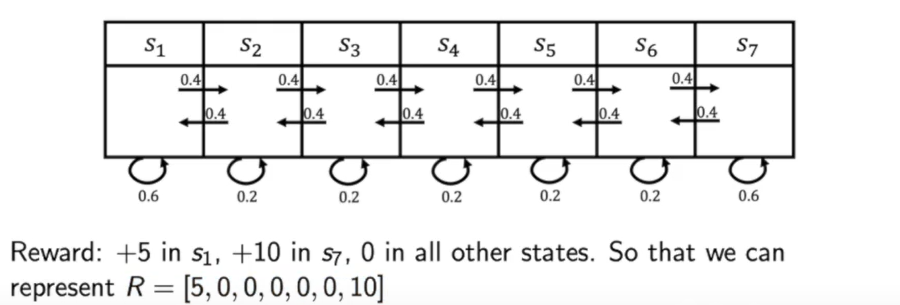
奖励可以用一个向量$R$来表示。
马尔可夫奖励过程 中Return的定义:

这里面包含一个折扣因子,距离我们越远的汇报折扣的越多。
马尔可夫奖励过程 中value function的定义:
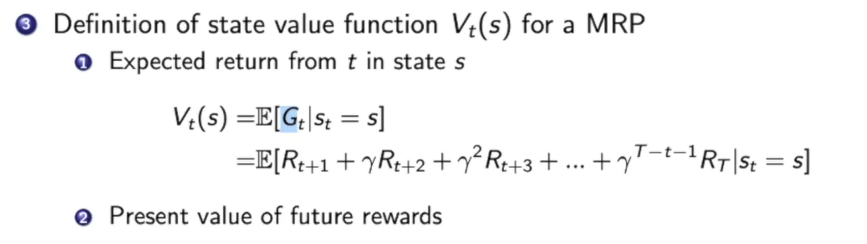
可以简单理解为从未来获得奖励和的期望
为什么我们加上了discount factor $\gamma$ 这个东西呢?
首先他很好的避免了环状的马尔可夫过程,避免了无穷的奖励
我们希望尽可能快的得到奖励
人和动物对立刻奖励有更大的倾向
当马尔科夫过程中的$\gamma$设置成1时,我们就把未来的奖励和当前立刻可以获得的奖励看成等价的,而把$\gamma$设置成0,说明我们只关心立刻获得的奖励。一般我们把这个$\gamma$当成超参数。
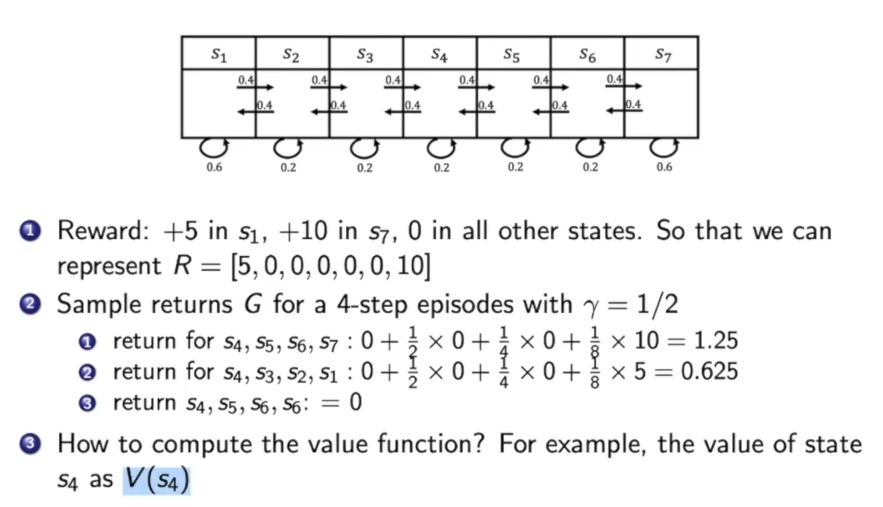
对于$s_4$我们如何计算在此处的价值呢?
我们可以从$s_4$开始移动,获得各种路径,再把路径所获得的reward传回来。我们可以蒙特卡洛计算,也可以通过下述的Bellman equation来算:
计算马尔可夫过程的价值:

首先value function的公式如上
我们可以给他换个写法:
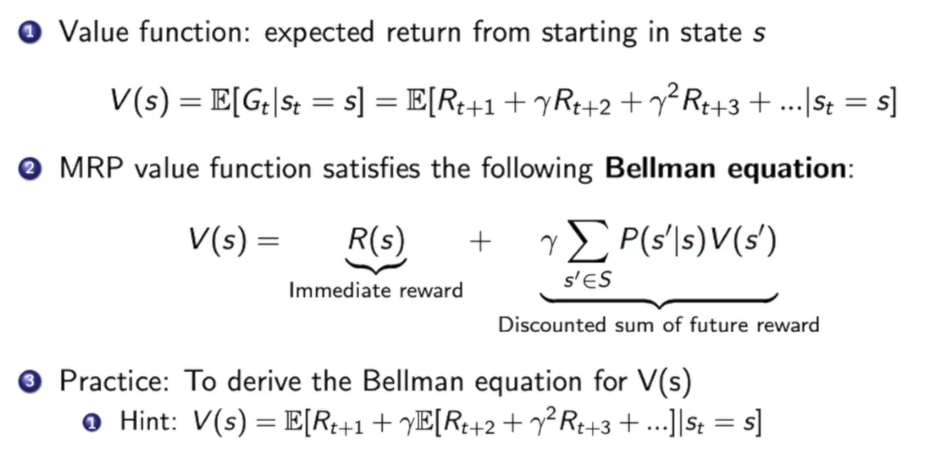
也就是bellman equation。
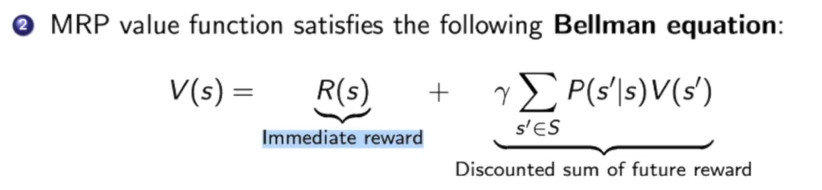
Bellman Equation:
Bellman Equation 定义了当前状态与下一个状态的关系
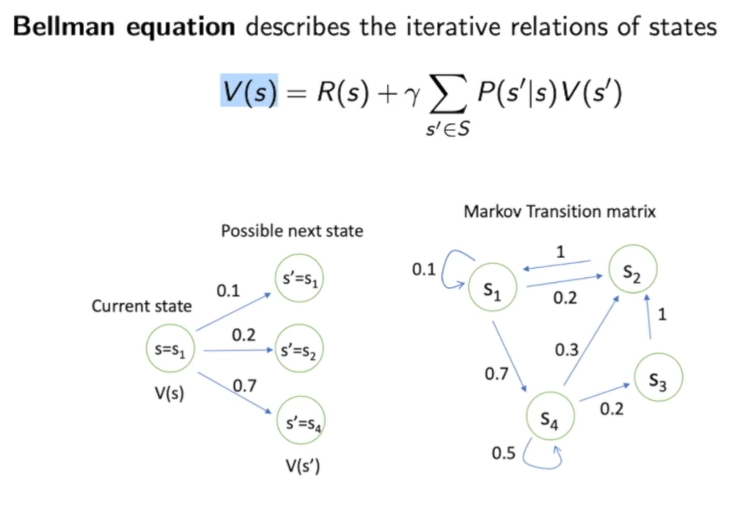
我们可以把bellman equation改写成矩阵形式:
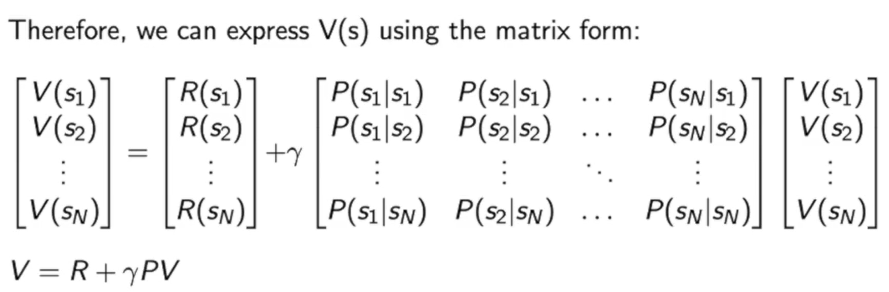
那么我们在此时就可以推导出矩阵V的形式:
但矩阵求逆的复杂度是$O(n^3)$,因此这种直接求逆的解法只适用于少量状态的马尔可夫过程。
我们可以通过迭代的方法解决大型的马尔可夫过程:
动态规划 Dynamic Programming
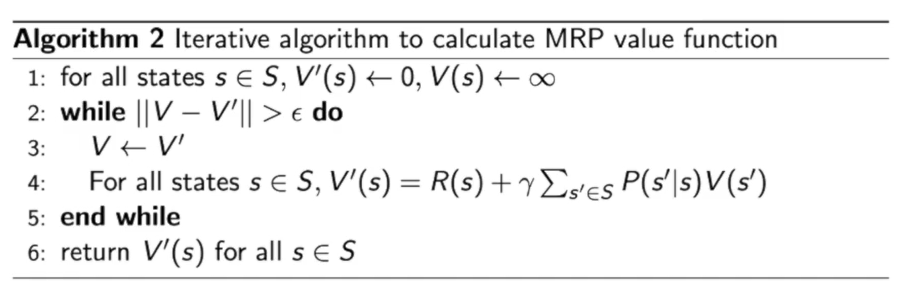
一直去迭代这个bellman equation,直到他们函数$v(s)$收敛
蒙特卡罗方法 Monte-Carlo
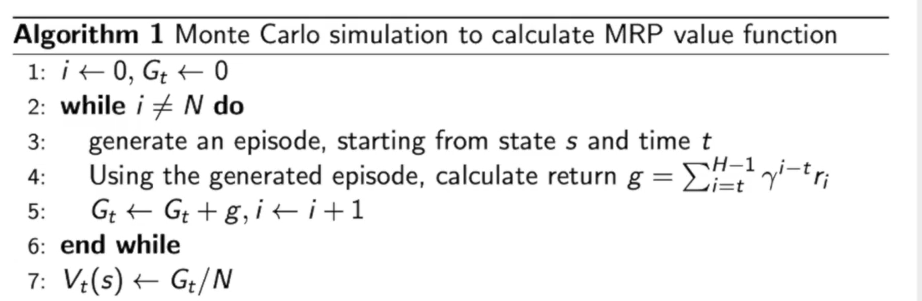
其实就是大量的模拟取平均,举个例子:
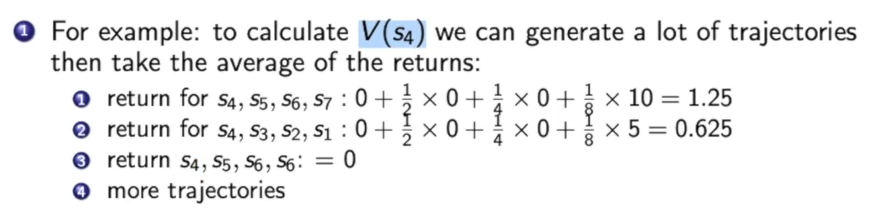
对于$s_4$的价值,我们首先随机的生成一些路径,看看这些路径带来的价值,然后用获得的价值和除以路径数,就可以估算这个状态点可以获得的价值期望。
马尔科夫决策过程(Markov Decision Process,MDP):
马尔科夫决策过程 = 马尔可夫奖励过程 + 决策(action)
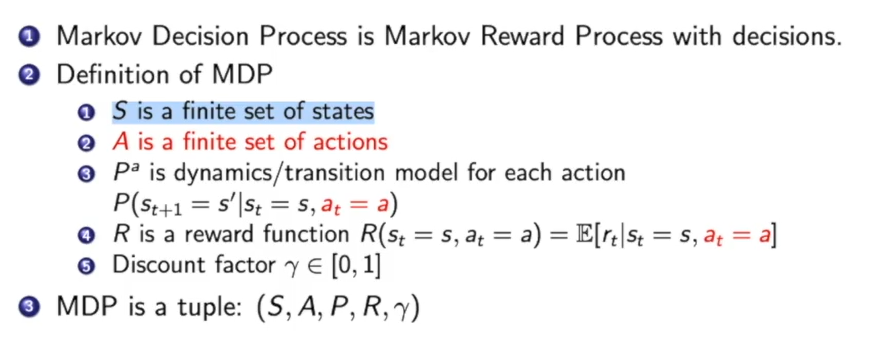
此时,状态转移的概率分布也会收到action影响,那么reward function也会受到action影响。
而action是什么是取决于策略(policy)的,而policy有两种,分别是:deterministic和stochastic的。

在这里我们有一个假设就是,各个时间点上都是在对policy function采样。
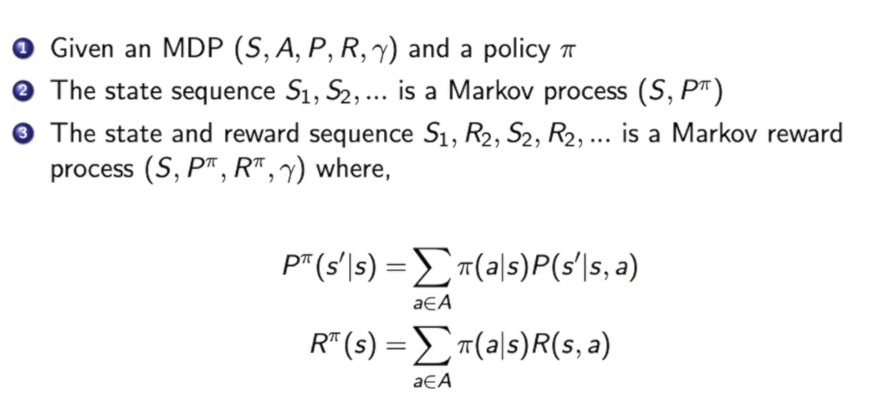
如果我们知道马尔可夫决策过程并已知采取的策略,那么我们就可以把马尔可夫决策过程转化为马尔科夫奖励过程。
马尔可夫奖励过程和马尔可夫决策过程的区别:
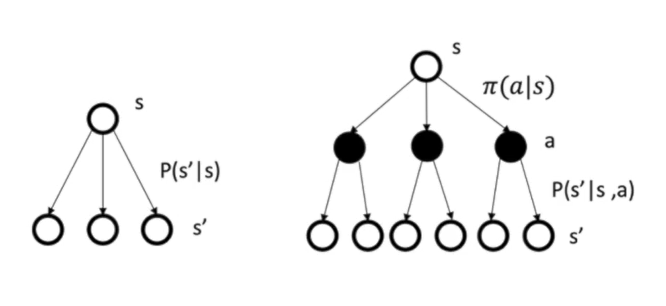
上图可以看出马尔可夫决策过程多了一个在某个状态下action的分布,这个action的不同会导致不同的状态转移矩阵。
在马尔可夫决策过程中:
对于一个状态价值函数$v^{\pi}(s)$,就是衡量在策略$\pi$下这个状态的价值。
在马尔可夫决策过程过出现了一个新的动作价值函数(action-value function),他表示在决策$\pi$下,状态$s$时,采取动作$a$,所获得的价值。

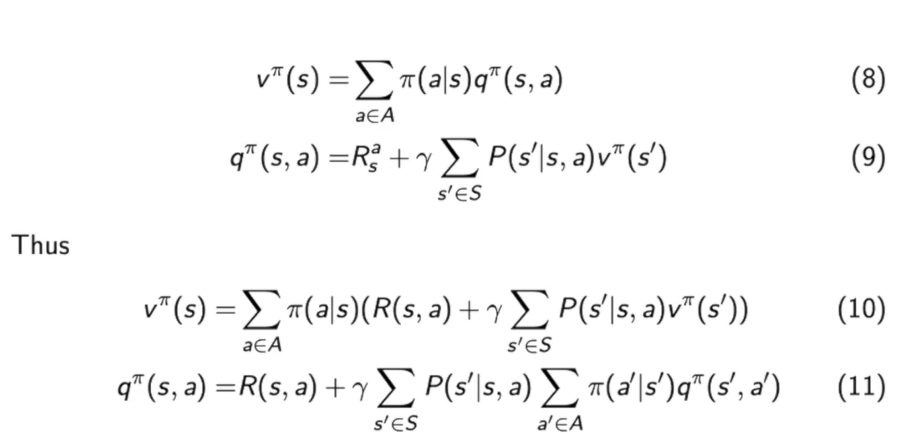
不难发现,$v^{\pi}(s)$和$q^{\pi}(s,a)$很相似,我们只需要让$q^{\pi}(s,a)$取到各种action,算一算期望,就可以得到$v^{\pi}(s)$。
因此:

$\pi(a|s)$代表在状态$s$下做出动作$a$的概率。
Bellman Expectation Equation:
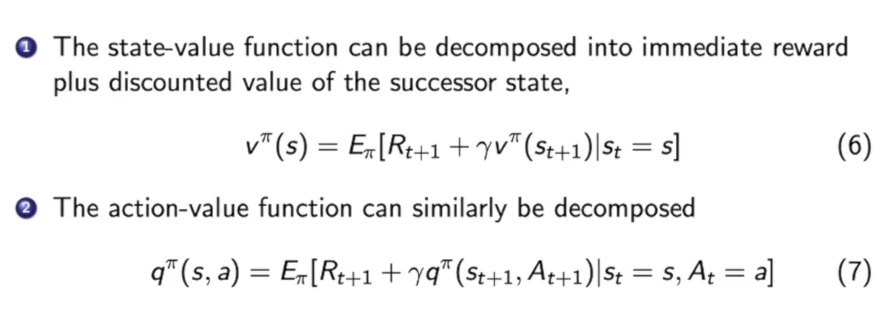
用当前状态和下一状态的方式 重写了 state-value function 和 action-value function。
上面我们提到了$v^{\pi}(s)$和$q^{\pi}(s,a)$的关系(即下式(8)),我们还有Bellman Expectation Equation(下式(9)),那么我们就可以推出(10),(11):
$v^{\pi}(s) =\sum{a \in A} \pi(a \mid s)\left(R(s, a)+\gamma \sum{s^{\prime} \in S} P\left(s^{\prime} \mid s, a\right) v^{\pi}\left(s^{\prime}\right)\right)$这个式子并不难理解,如下图:
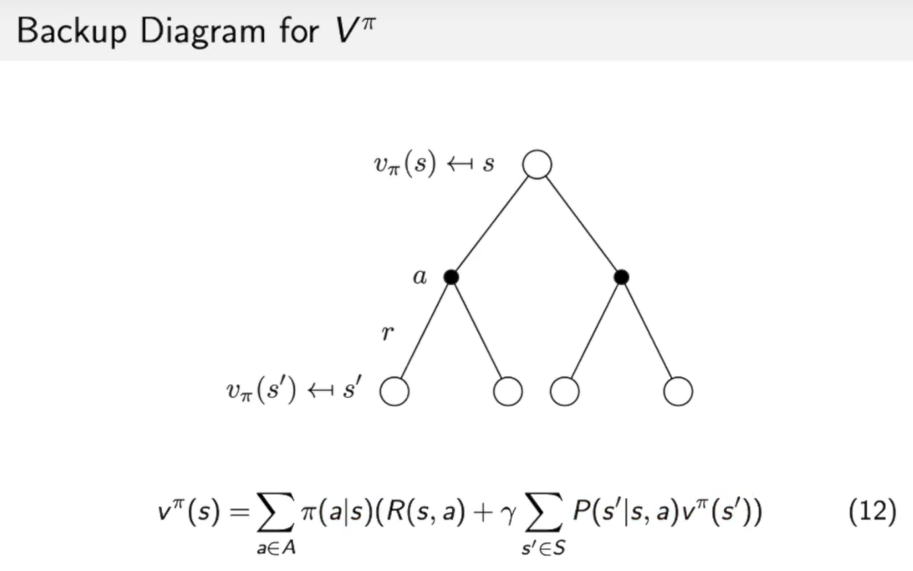
首先$R(s,a)+\gamma \Sigma_{s’ \in S}P(s’|s,a)v^{\pi}(s’)$代表在状态$s$,做出动作$a$,到达状态$s’$时的价值所得到的reward。也就是叶子节点backup到了黑色节点action,代表在这个动作下所获的reward,也就是$q^{\pi}(s,a)$。第二次backup就是action节点到根节点状态s,即:
$v^{\pi}(s)=\sum{a \in A} \pi(a \mid s)\left(R(s, a)+\gamma \sum{s^{\prime} \in S} P\left(s^{\prime} \mid s, a\right) v^{\pi}\left(s^{\prime}\right)\right)$
相当于对不同action的reward 乘上这个action在状态s下出现的几率,计算了在状态s获得价值的期望。
最后举一个例子:
马尔可夫链/马尔科夫奖励过程相当于小船随波逐流,到哪儿完全凭随机,没有任何主观的干扰(比如action)。而马尔可夫决策过程则完全不同,除了河流的流向影响着状态,船夫所做的行动也会影响船的走向。
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!