强化学习纲要Ch4-无模型价值函数估计和控制-上
无模型的价值函数估计和控制—上
这一次讲的是model-free的value function的预策(prediction)和控制(control)。
model-free就是指无模型,MDP不是已知的。也就是说我们不知道$R(Reward)$和状态转移矩阵$P$
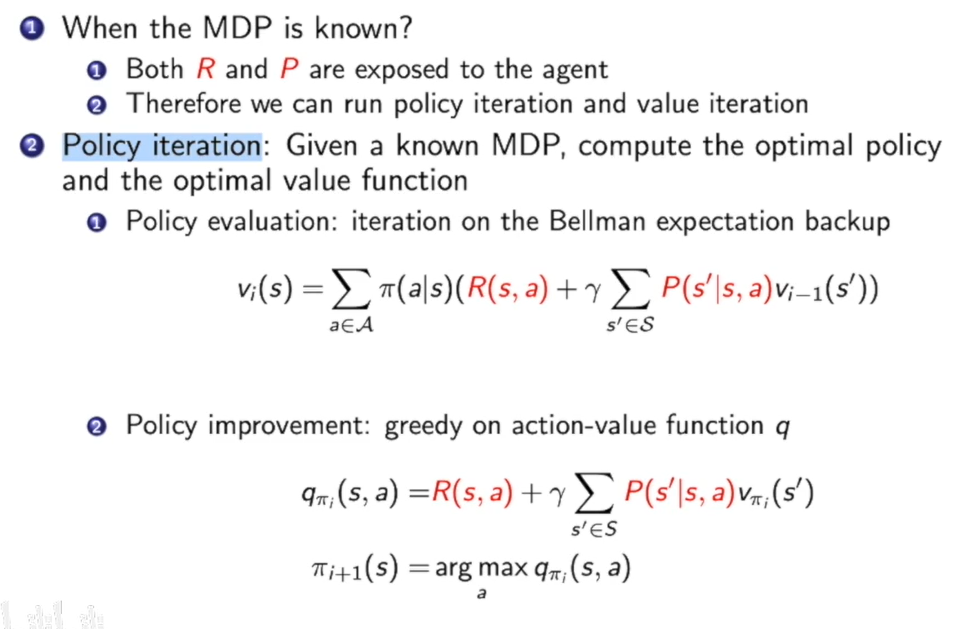
下面是上一次课的concise review:
对于Model-free的RL,我们没有了R和P, 因此我们需要从交互过程中来学习:
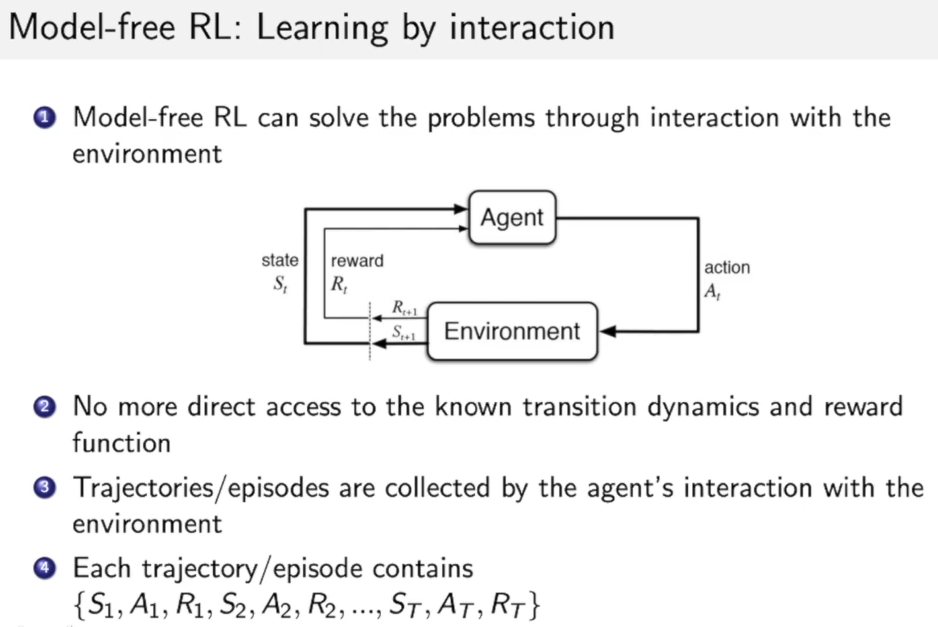
而交互过程就是这样的一个序列:${S_1,A_1,R_1,S_2,A_2,R_2,..S_T,A_T,R_T}$
在model-free时,如何在特定的策略下,估计状态的价值函数呢?
蒙特卡洛策略估计
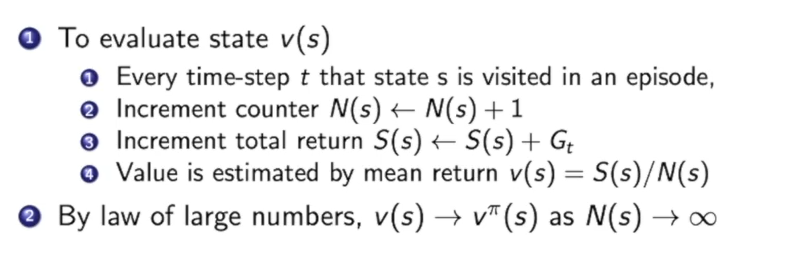
为了写成迭代的形式,我们可以建立一个上一时刻的平均值和下一时刻平均值的关系:
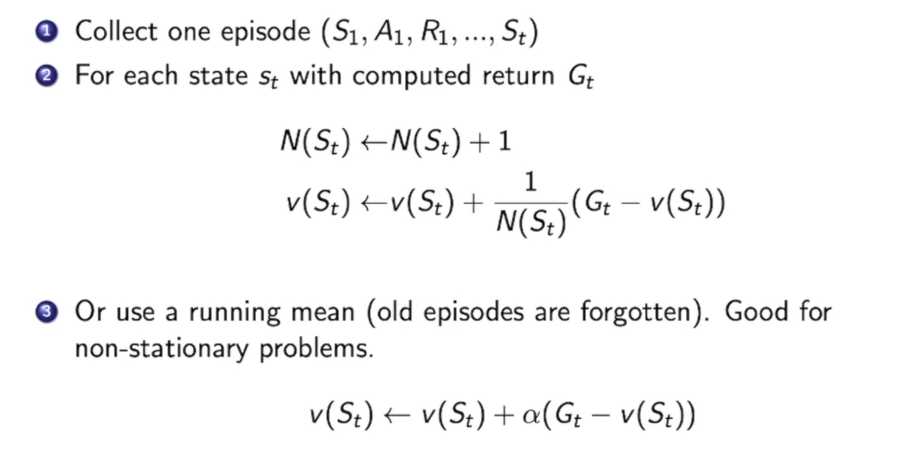
$\begin{aligned} \mu{t} &=\frac{1}{t} \sum{j=1}^{t} x{j} \ &=\frac{1}{t}\left(x{t}+\sum{j=1}^{t-1} x{j}\right) \ &=\frac{1}{t}\left(x{t}+(t-1) \mu{t-1}\right) \ &=\mu{t-1}+\frac{1}{t}\left(x{t}-\mu_{t-1}\right) \end{aligned}$
利用这个方法,我们可以改写一下蒙特卡洛的方法:
这里比较一下蒙特卡洛MC方法和动态规划DP方法的区别:
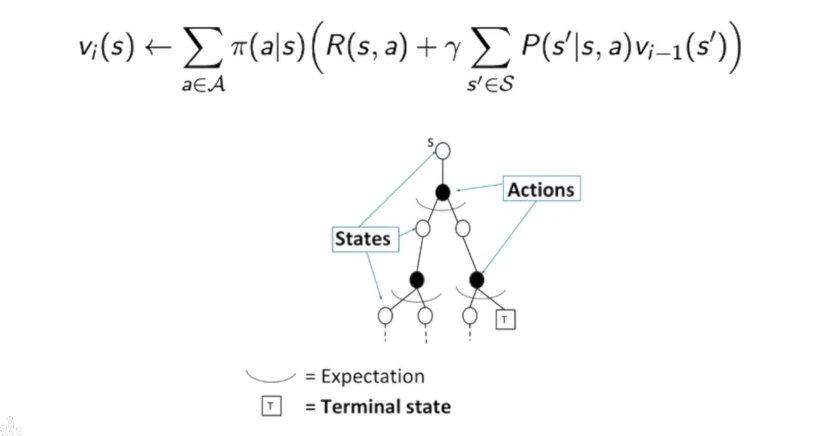
在DP中,我们获得一个状态的价值是根据下层所有情况来得到的。
而在MC中:
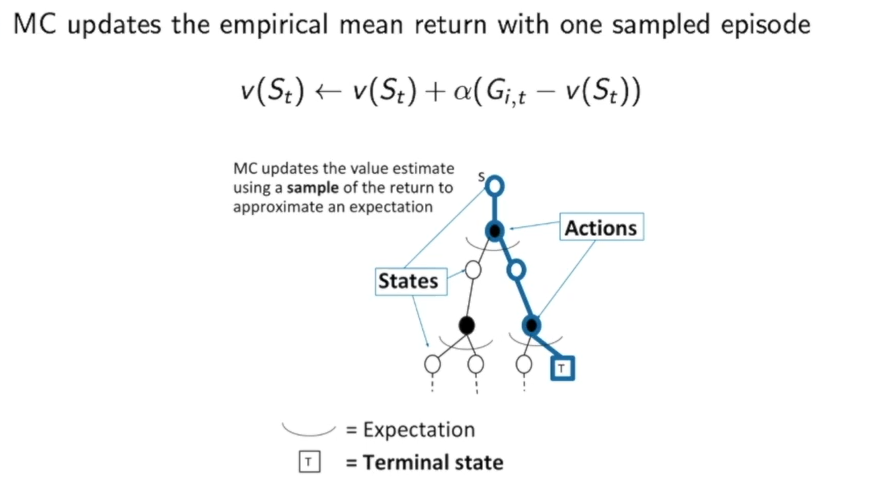
我们只是根据几条路径来大致估计的,可能有些路径会被忽略掉,因此并不是根据下层所有可能出现的情况来得到状态的价值的。
造成这样区别的主要原因就是:我们不知道状态转移概率矩阵P。
Temporal Difference(TD) learning ,时间差分学习
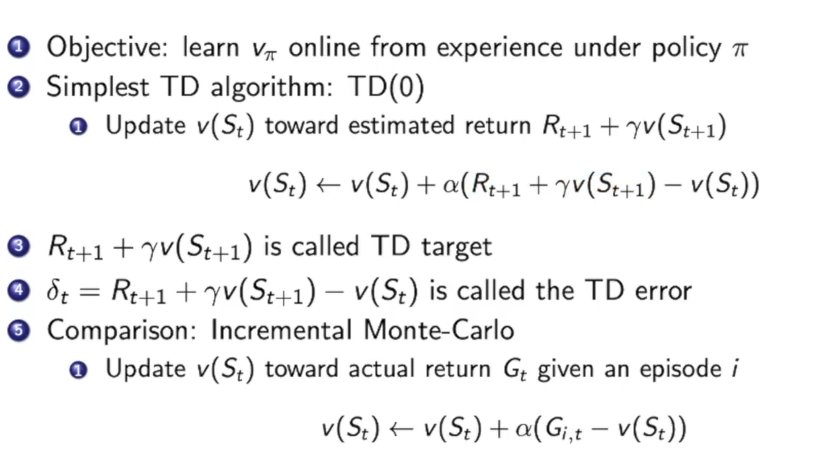
TD方法也是用了上面的一个online mean的技巧,这里它通过TD target(即$R{t+1}+\gamma v(S{t+1})$)来更新,这一步由两部分分别是$R{t+1}$和$\gamma v(S{t+1})$:
$R{t+1}$是在新的一步中直接获得的奖励,第二部分$\gamma v(S{t+1})$利用了动态规划的思想,利用之前的估计来估计现在的,也就是当前$St$可以转移到$S{t+1}$,那么就用$S_{t+1}$的value function的值来更新即可。
我们对比一下TD和 MC方法的区别:
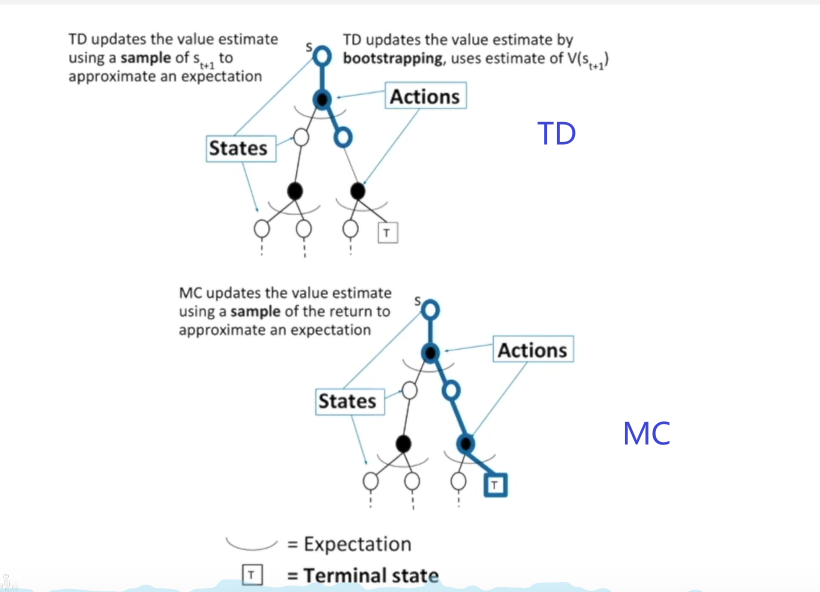
更多的区别:
- TD算法在每一步状态的转移下都可以实时在线学习,而MC必须做完一个episode才能知道return的大小。
- TD可以从不完整的交互序列来学习,而MC不可以,他必须需要一个完整的交互序列才可以得到return
- TD可以在一个无终止的环境下学习,而MC由于需要完整的序列,而无终止环境下序列是无限长的,因此MC无法在无终止的环境下学习。
- 当然,TD也有缺点,就是TD假设了强化学习任务有马尔科夫特征,即当前状态只和上一时刻有关系,而与更早的时刻无关。而MC没有对马尔科夫环境做出要求。
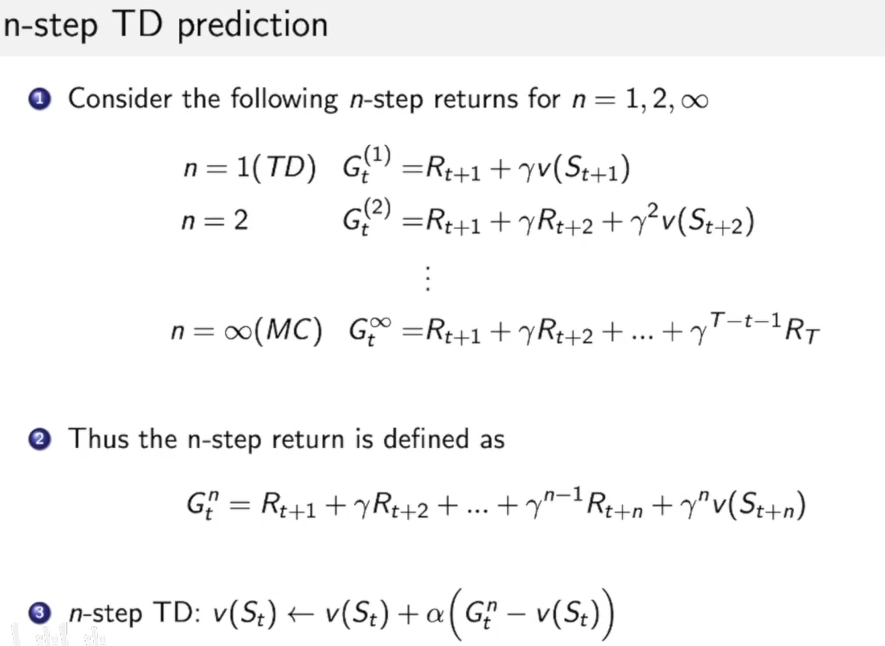
TD有一些灵活的用法,比如n-step TD:
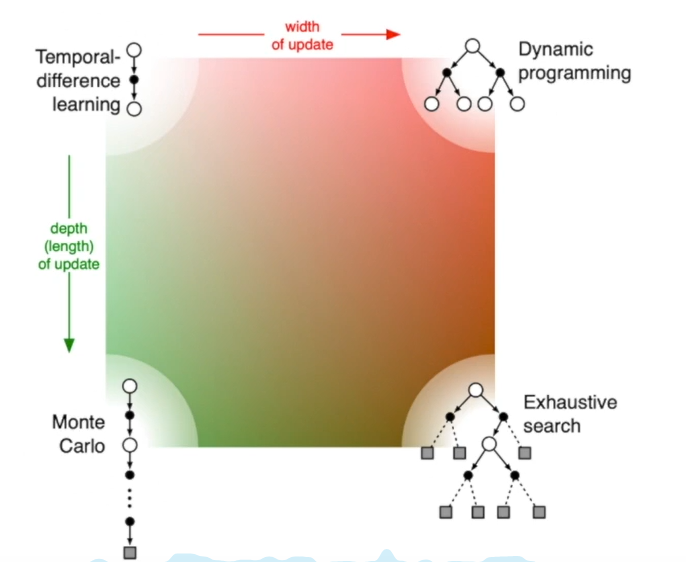
TD的step如果远一些,那么就会加大搜索深度,到达极限即使MC方法,也就是找到一条完整的路径来算return。而TD加宽搜索广度即是DP方法。如果又宽又广即是穷举了决策树,也就是穷举算法。
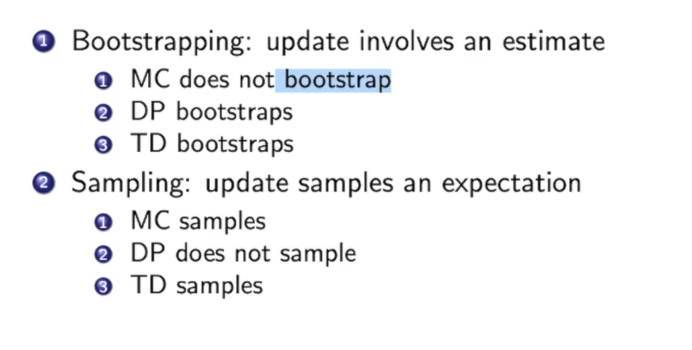
统计学中,bootstrapping可以指依赖于重置随机抽样的一切试验。bootstrapping可以用于计算样本估计的准确性。对于一个采样,我们只能计算出某个统计量统计量)(例如均值))的一个取值,无法知道均值统计量的分布情况。但是通过自助法(bootstrapping)我们可以模拟出均值统计量的近似分布。有了分布很多事情就可以做了(比如说有你推出的结果来进而推测实际总体的情况)。
在这里我们可以简单理解为在估计上估计(estimate by estimating),比如DP就用到了这种思想,利用了其他状态的value function的值来估计一个状态value function的值。
而MC没有,他是抽取了决策树的一部分的支路,然后取了个平均,每一步都是实实在在的return,没有任何估计,因此是estimate by sampling。
而在TD中由于TD target包含两部分:$R{t+1}$和$\gamma v(S{t+1})$
$R{t+1}$是通过真实的走一步,看看得到了环境的return是什么,因此这是sample,而后面的$\gamma v(S{t+1})$就是利用了bootstrap。
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!