GAMES101(1-4):图形学数学基础和Transformation
GAMES101-现代计算机图形学入门
Lec1: Overview
本课包含的几个基本的tipic:
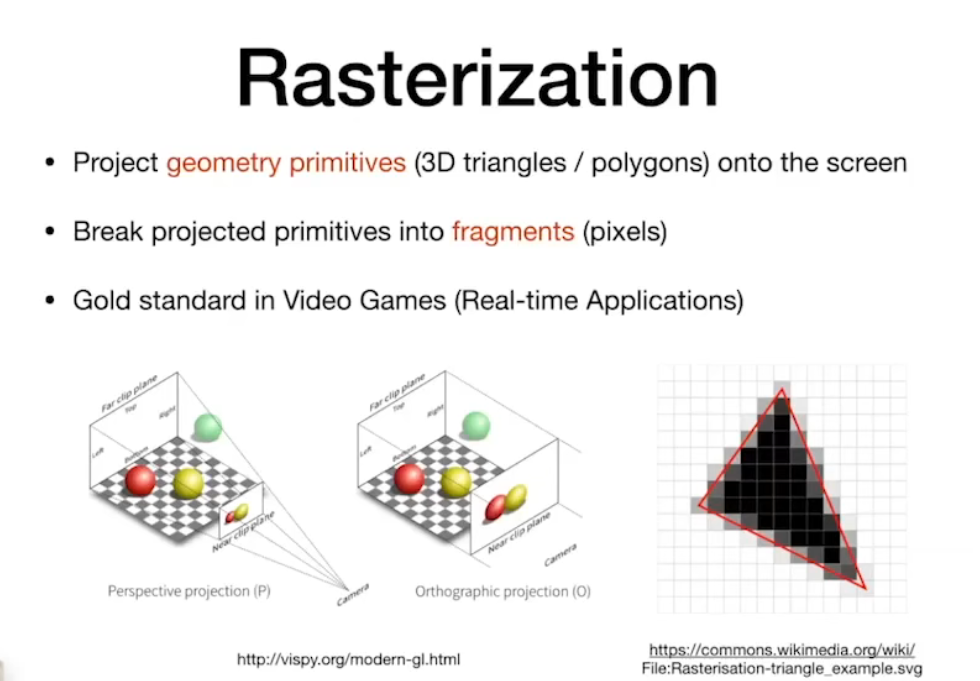
- 光栅化 Rasterization
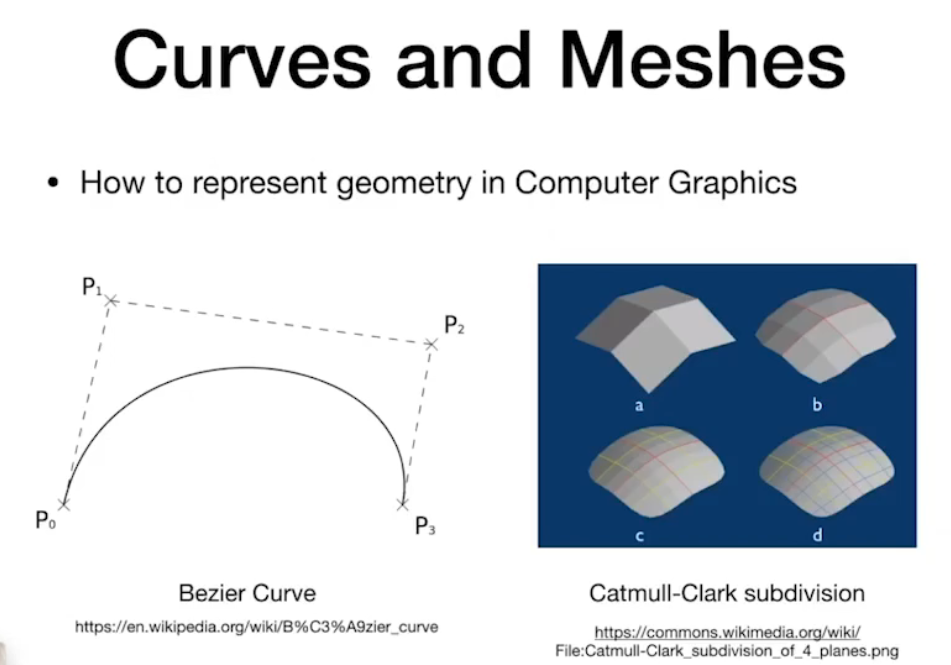
曲线/曲面Curves and Meshes
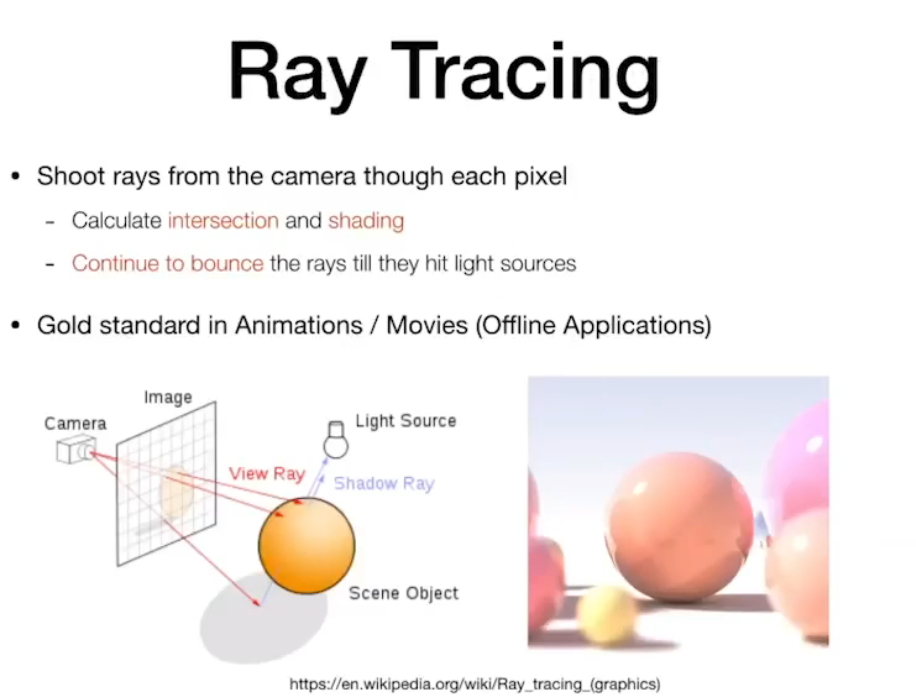
光线追踪 Ray Tracing
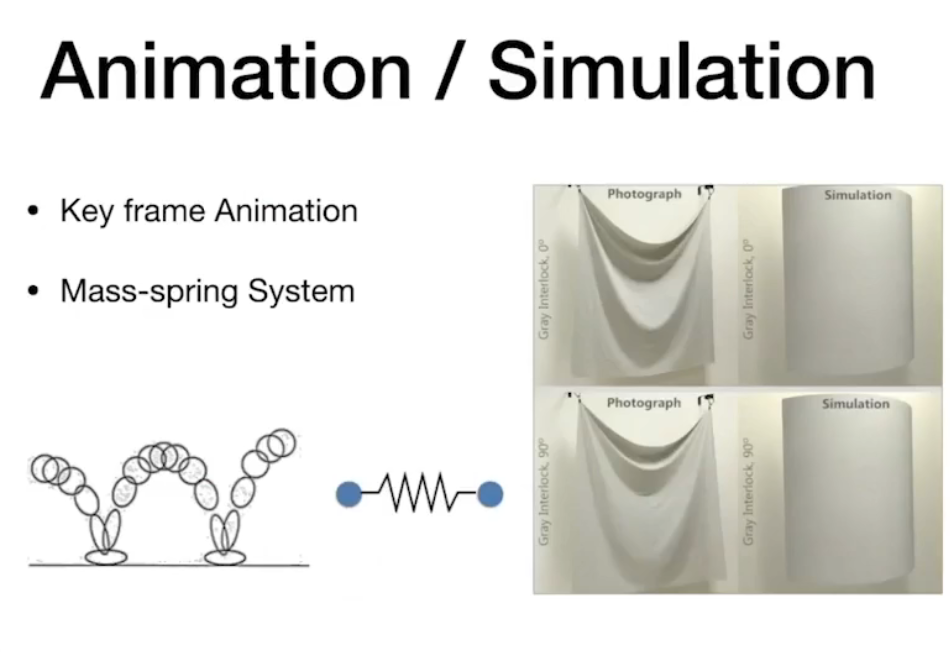
动画/模拟 Animation/Simulation
Lec2: Review of Linear Algebra
向量
- $\vec{a}$,代表一个方向,因此向量平移后还代表原向量。
- 单位向量:
- 向量求和:平行四边形法则/三角形法则
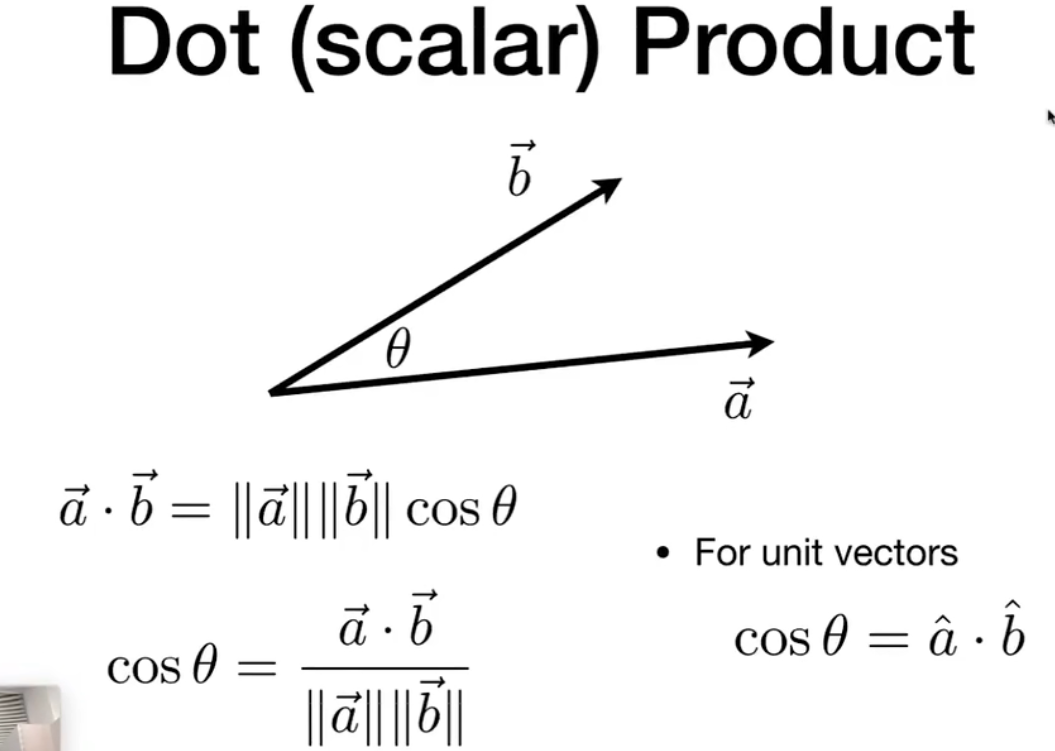
点乘
点乘:常用于计算夹角/向量投影
点乘: 符合 结合律/分配律/交换律
点乘还可以用于区分前后:
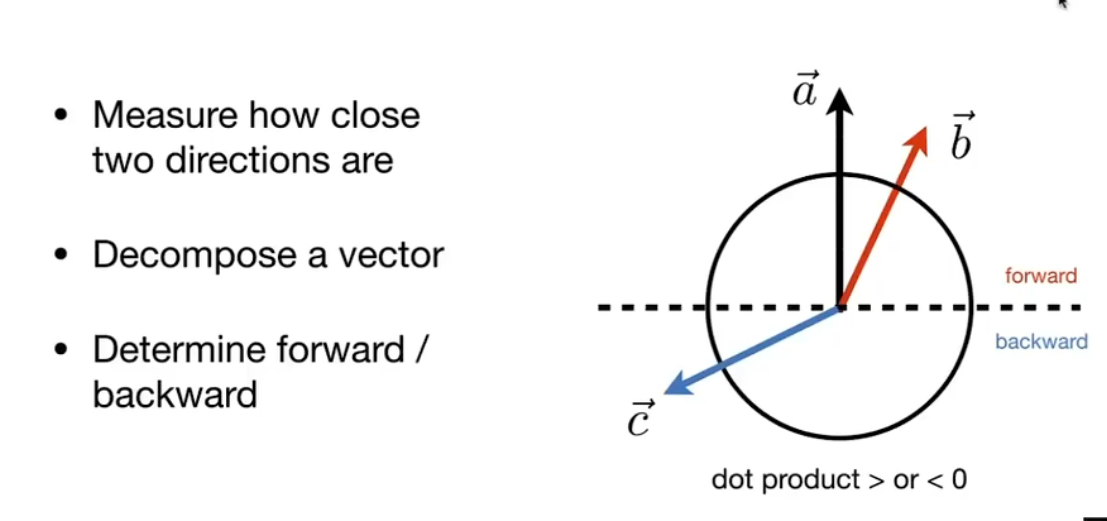
例如 $\vec{b},\vec{c}$ 和 $\vec{a}$做点乘,大于0说明在前方,小于0在后方
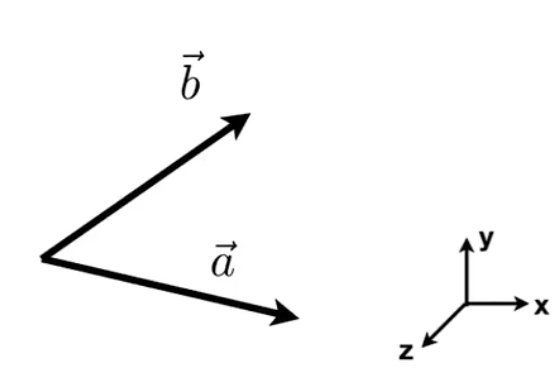
叉乘
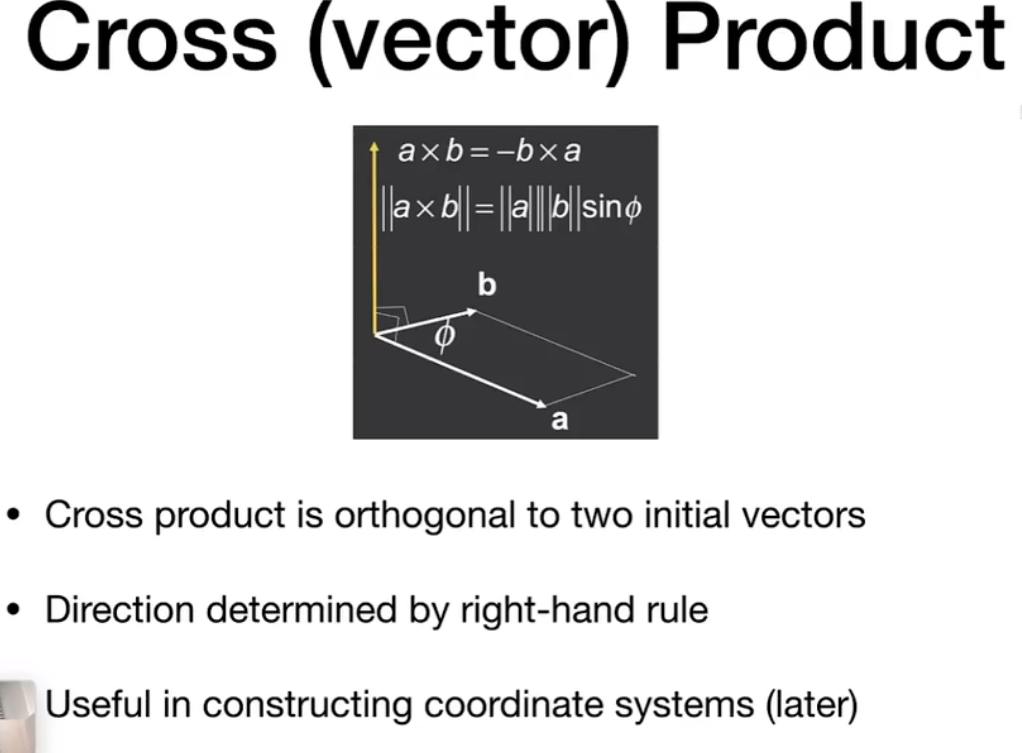
叉乘出的向量垂直于两个向量
方向:右手定则 (四指从$\bold{a}$绕到$\bold{b}$) 可依法向
一个右手坐标系: $\bold{x} \cross\bold{y} = \bold{z}$
一个左手坐标系: $\bold{x} \cross\bold{y} = \bold{-z}$
基本运算法则:自己叉乘自己是0向量,有分配律
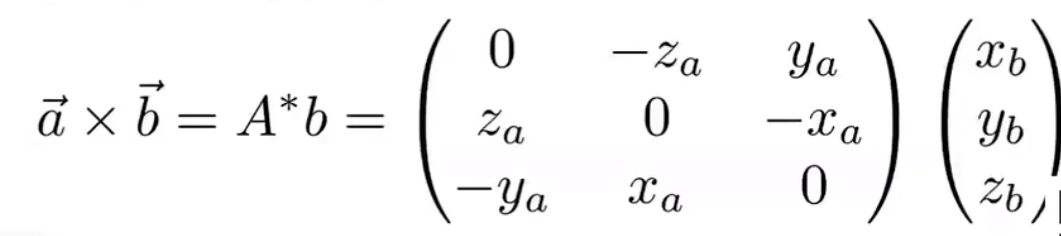
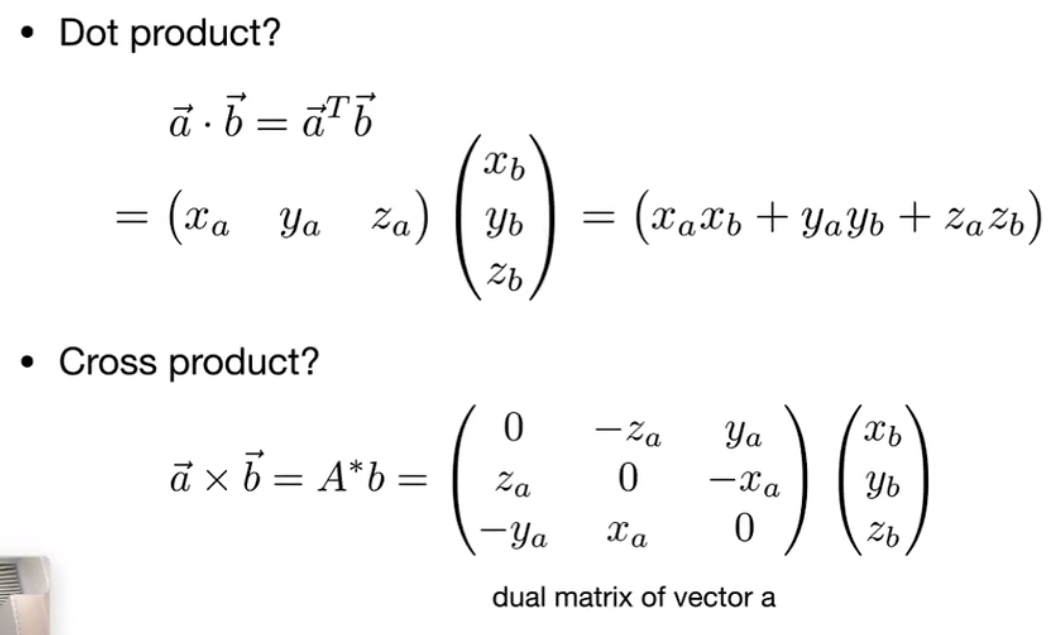
叉乘可以写成矩阵形式:
叉乘作用:
判定左/右:
如何判断$\bold{b}$是否在$\bold{a}$的左侧? 用$\bold{a}\cross\bold{b}$即可,判断叉乘是否为正,若为正说明在左侧,反之在右侧。
判断一个点是否在一个图形内部:
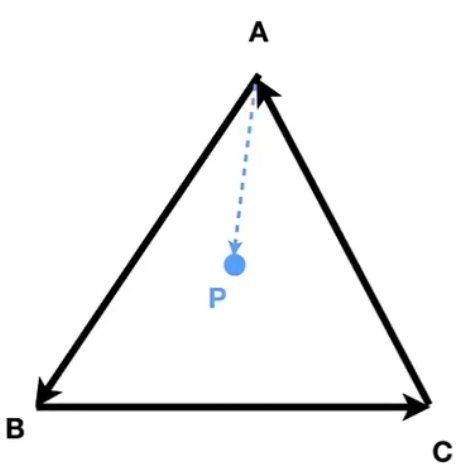
用$\vec{AB}\cross\vec{AP}$ 若为正说明在$\vec{AB}$左侧,同理计算$\vec{BA}\cross\vec{BP}$ 和$\vec{CA}\cross\vec{CP}$ 发现都为正,那么说明这个点 $p$ 都在首位相接的向量的左侧,那么说明在这个首位相接向量构成的图形的内部。
若这三条边是一个顺时针的呢?同理,会发现都在右边。
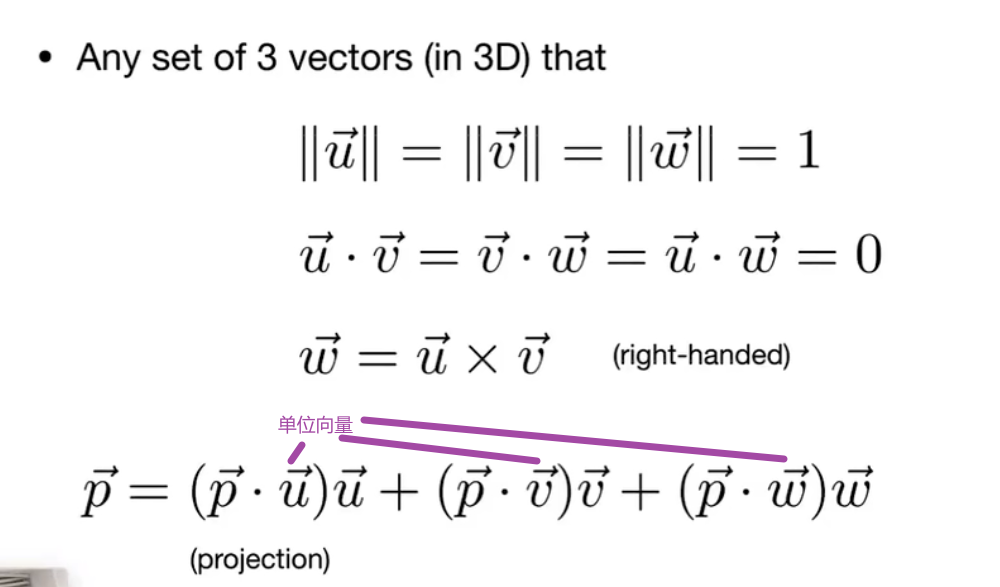
正交坐标系
矩阵
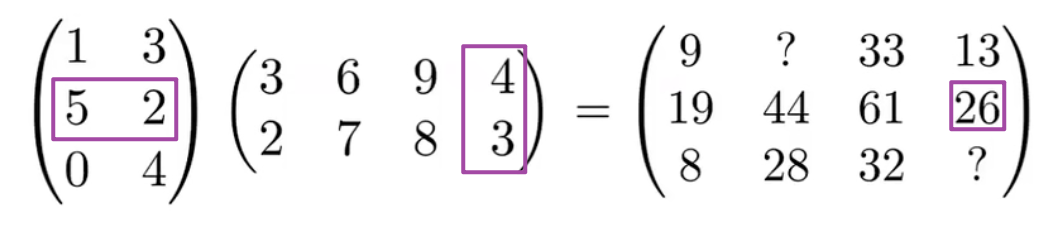
矩阵乘法: 第一个矩阵的列数必须等于第二个矩阵的行数
矩阵乘法不符合交换律, 符合结合律/分配律:
矩阵-向量乘法:
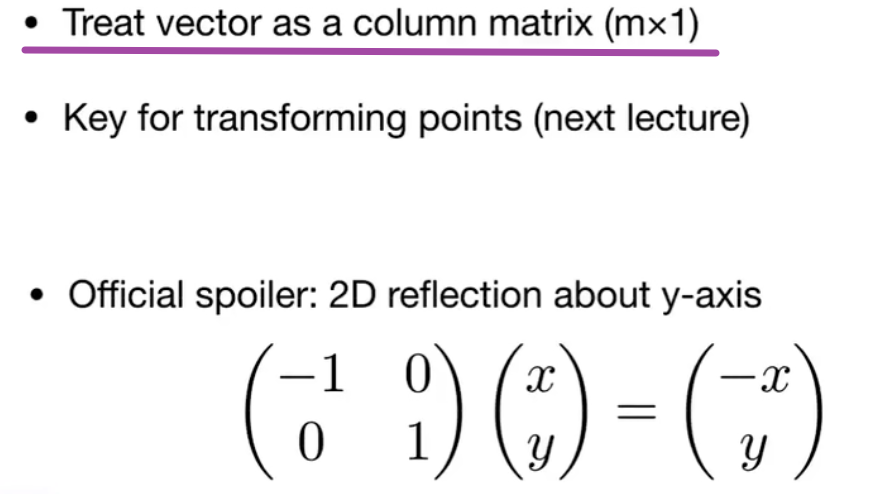
把向量当成一个$m*1$的矩阵即可
矩阵转置:
单位矩阵和逆矩阵:
点乘叉乘转换成矩阵形式:
Lec3: 变换Transformation
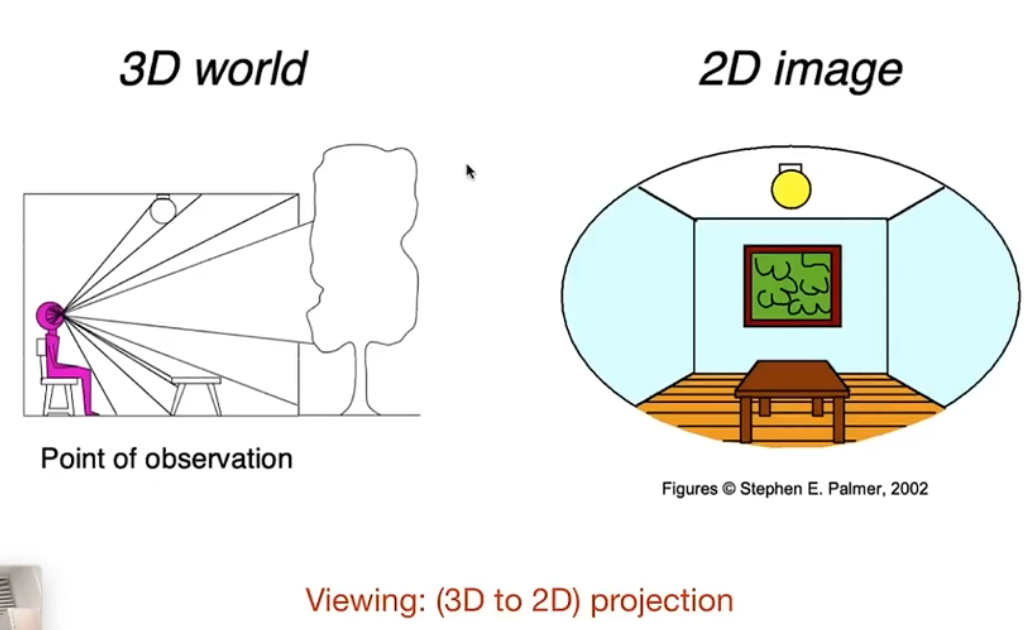
三维到二维投影:三维世界到二维平面
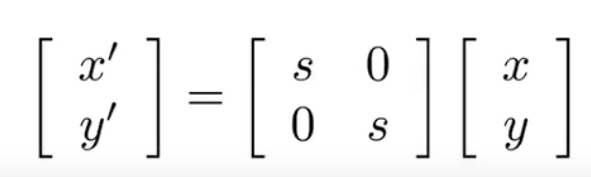
Scale Transform/尺度变换
均匀缩放:
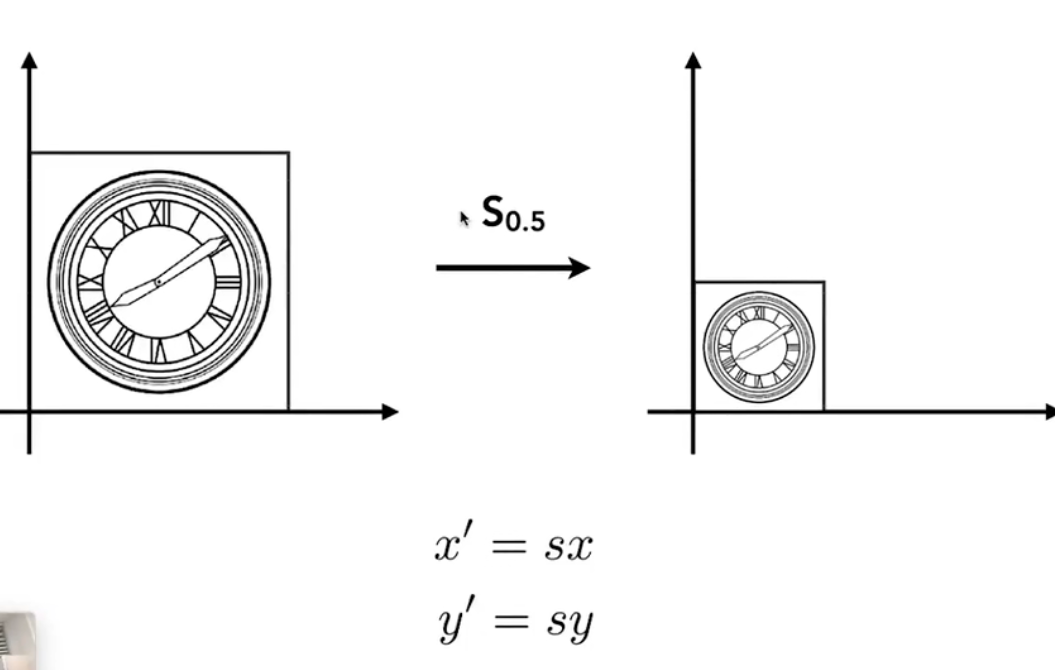
写成矩阵形式:
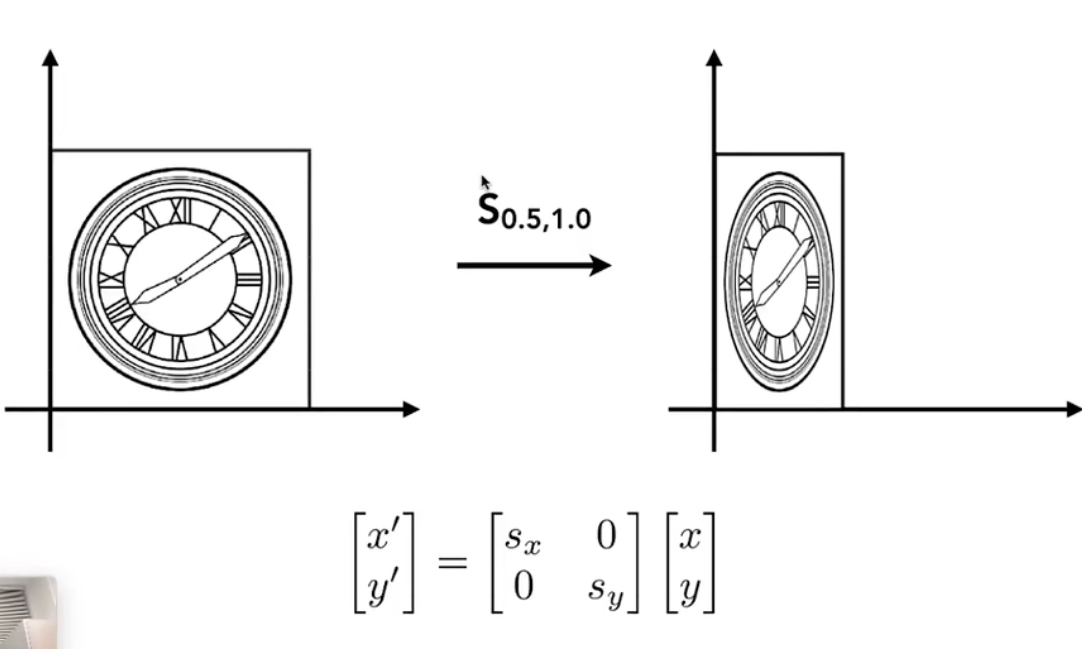
非均匀缩放:
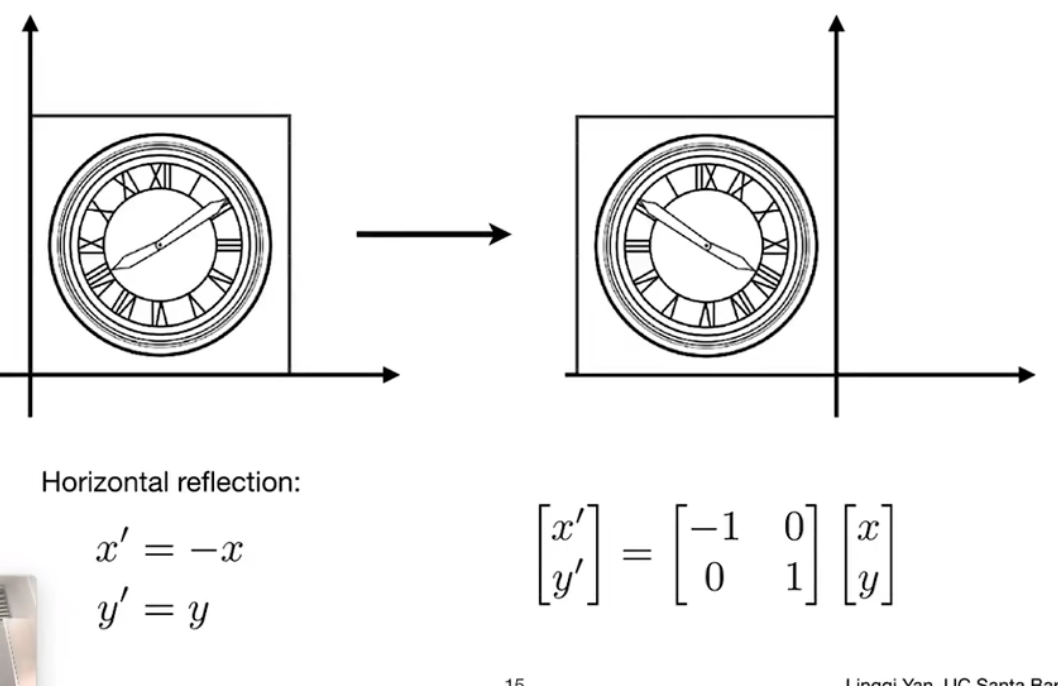
图像反转:
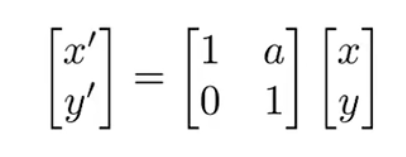
shear/错切变换 :
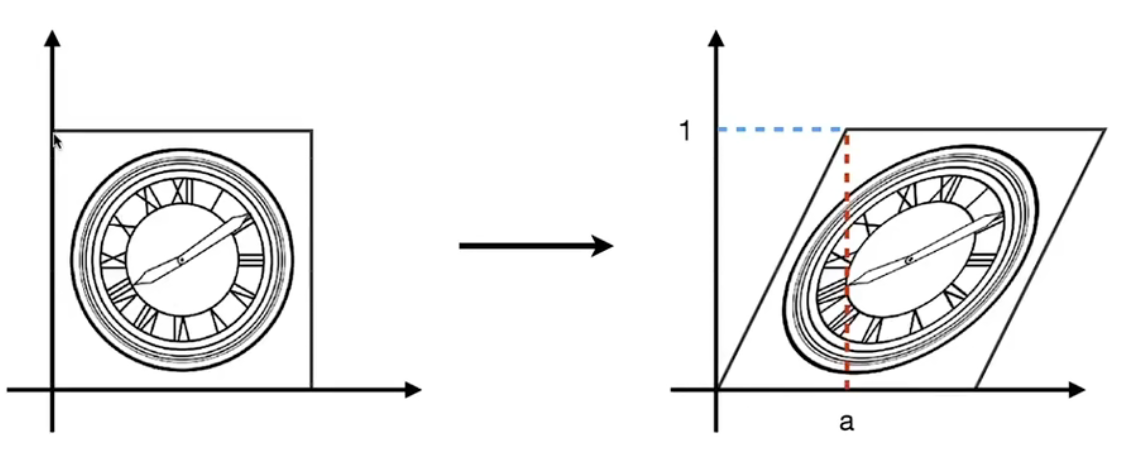
相当于y方向大小不变,向右拉扯。
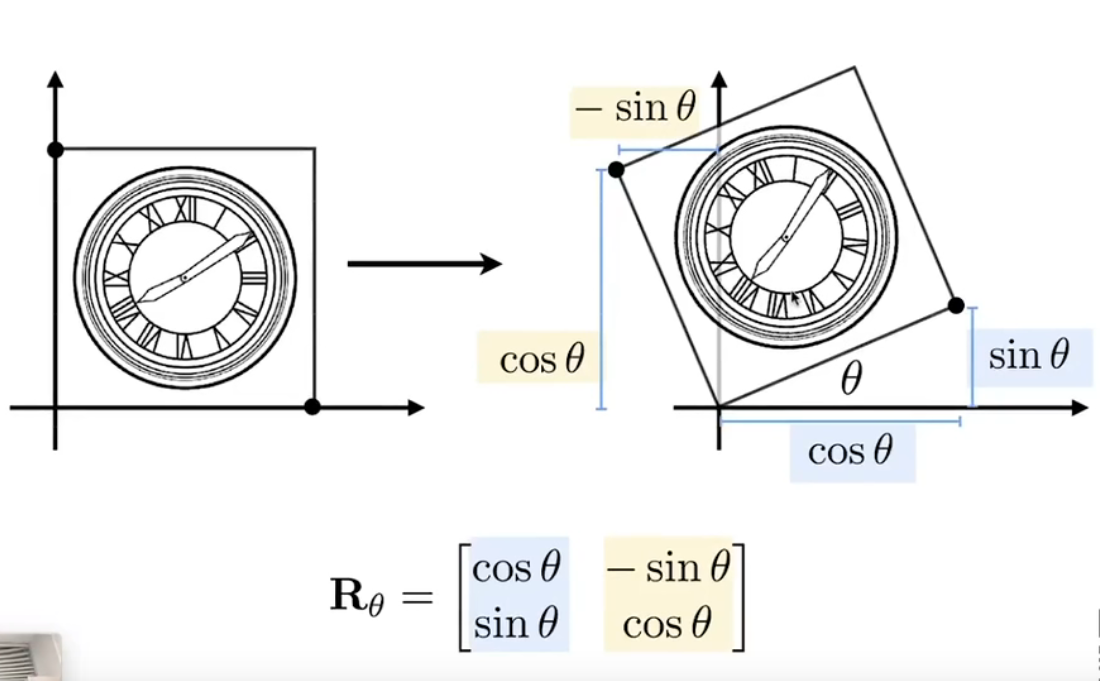
Rotate/旋转变换(逆时针旋转$\theta$)
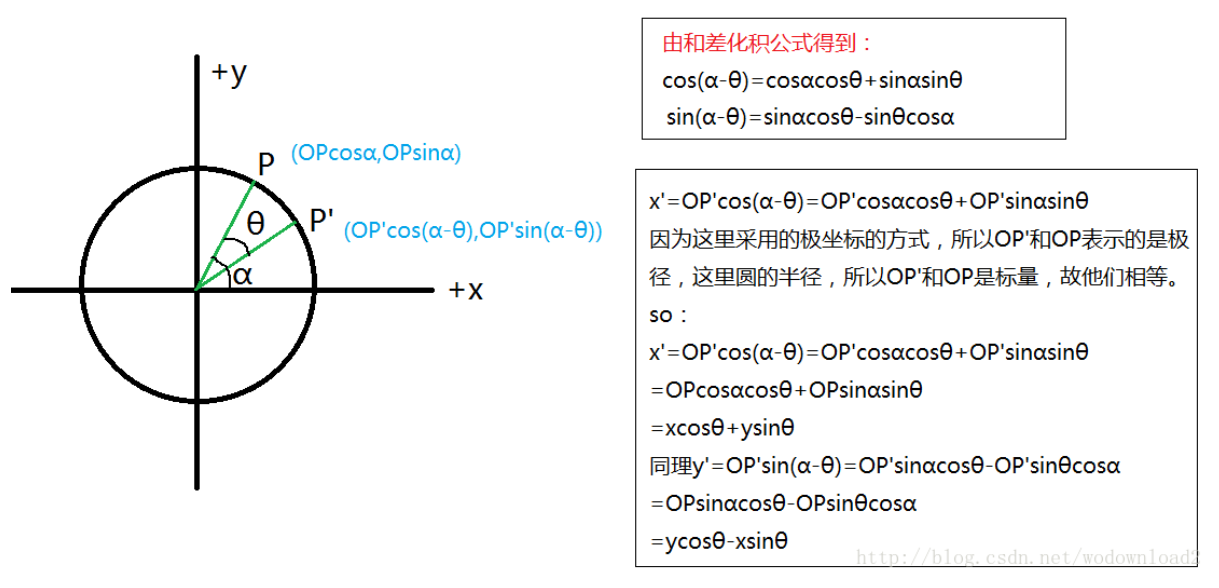
推导过程(下面推导是针对顺时针旋转$\theta$):
考虑顺时针旋转:顺时针旋转$\theta$相当于逆时针旋转$-\theta$,那么带入后会发现$\R{-\theta}$的结果就等于$R{\theta}^T$ 即顺时针旋转的逆矩阵。同时会发现
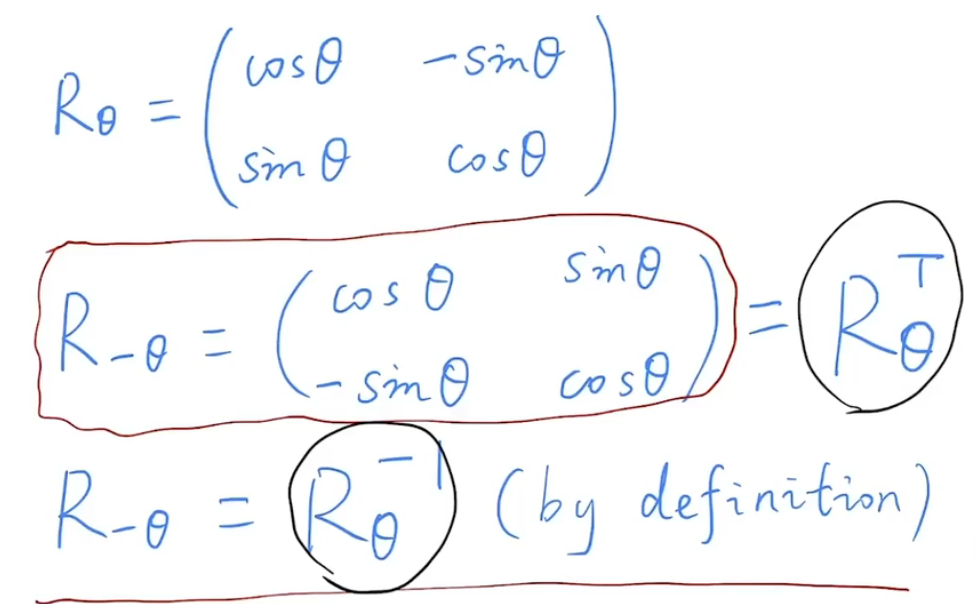
因此如果想让一个坐标顺时针旋转,左乘$R{\theta}^T $或者$ R{\theta}^{-1}$都是可以的。
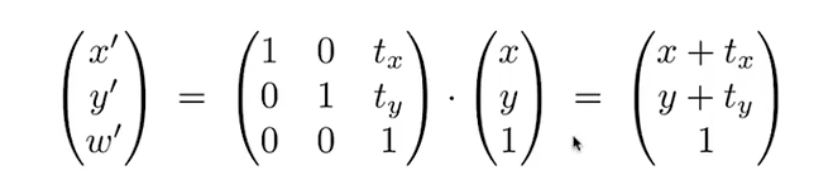
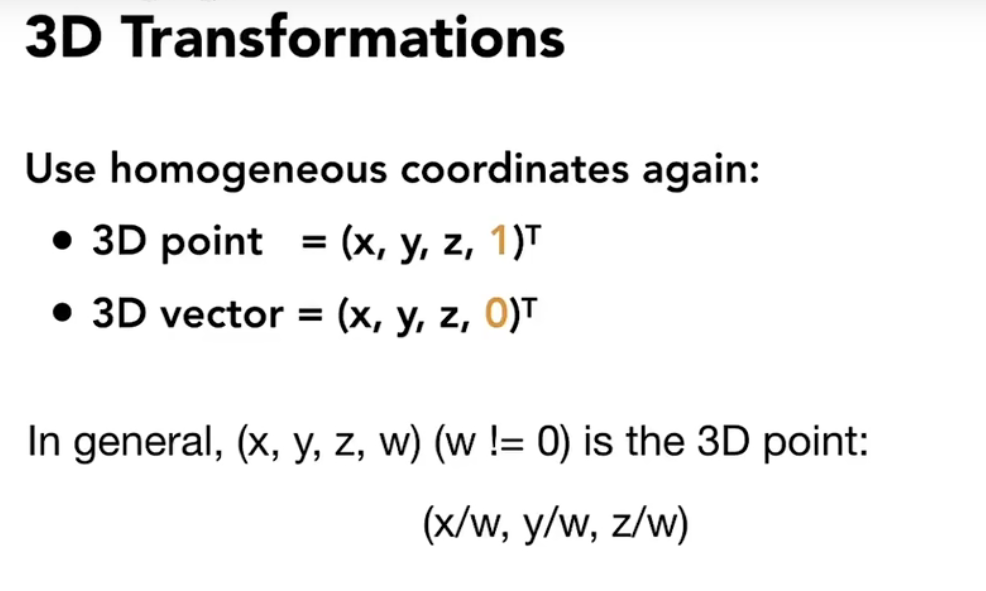
homogeneous coordinates/齐次坐标
齐次坐标常用来做平移。
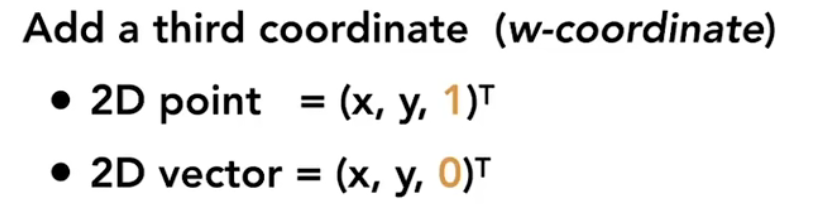
因为原来的二维矩阵乘坐标后总会含有x/y,无法表示一个常数项的偏移,不妨给变换矩阵加一个维度表示偏移。
但是对于一个向量:由于它具有平移不变性,加的齐次坐标只能是0,为的是如果有一个向量也经过这个平移变换矩阵后不会影响他。
同时齐次坐标的做法还保证了下面的性质:
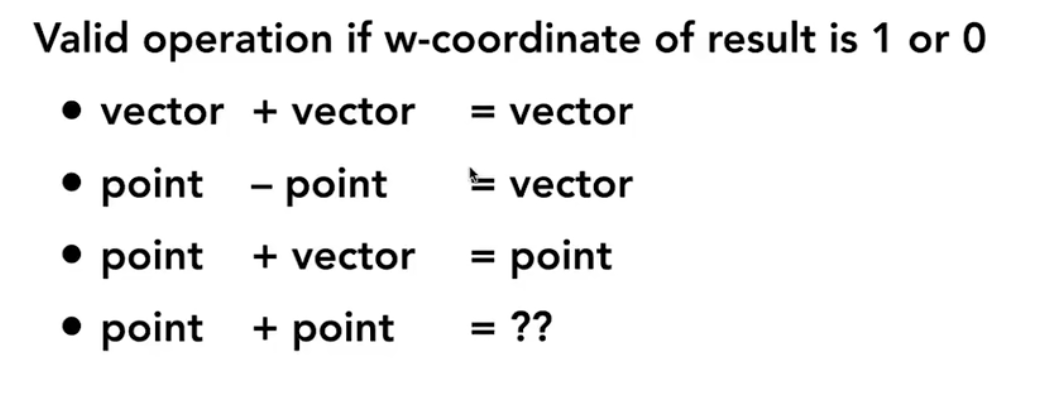
最后一个点+点一般认为是没意义的,我们也可以这么理解:
我们总是保证第三位的齐次坐标是1,那么点+点就是中点。
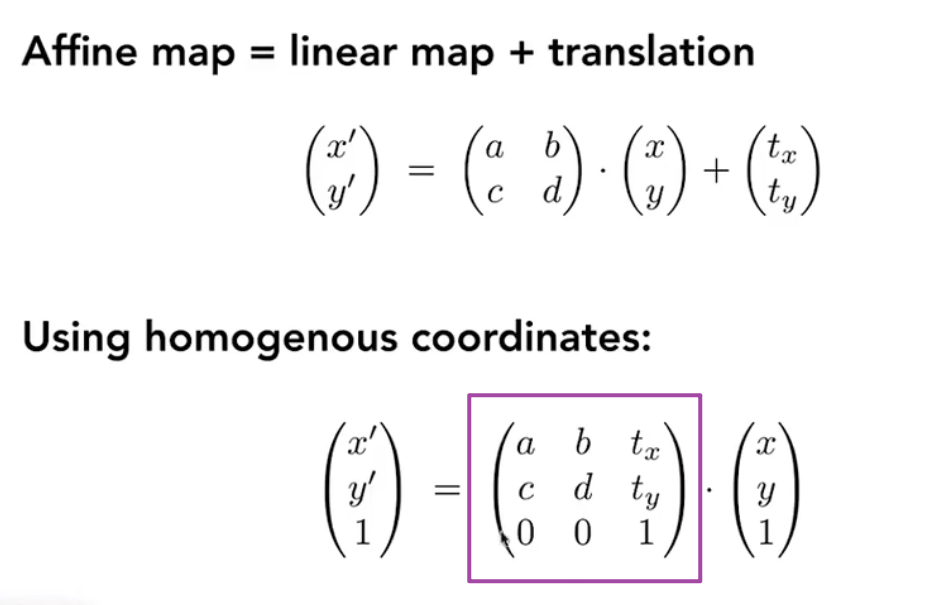
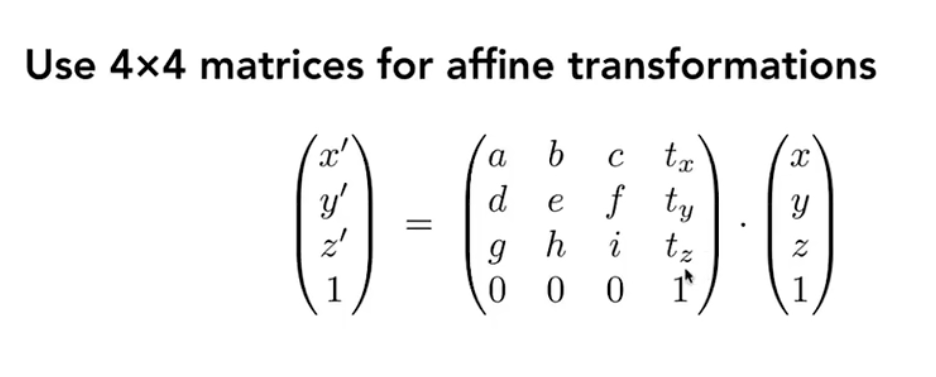
Affine Transformation/仿射变换
我们可以把以上总结为仿射变换:同时包含平移和缩放变换。
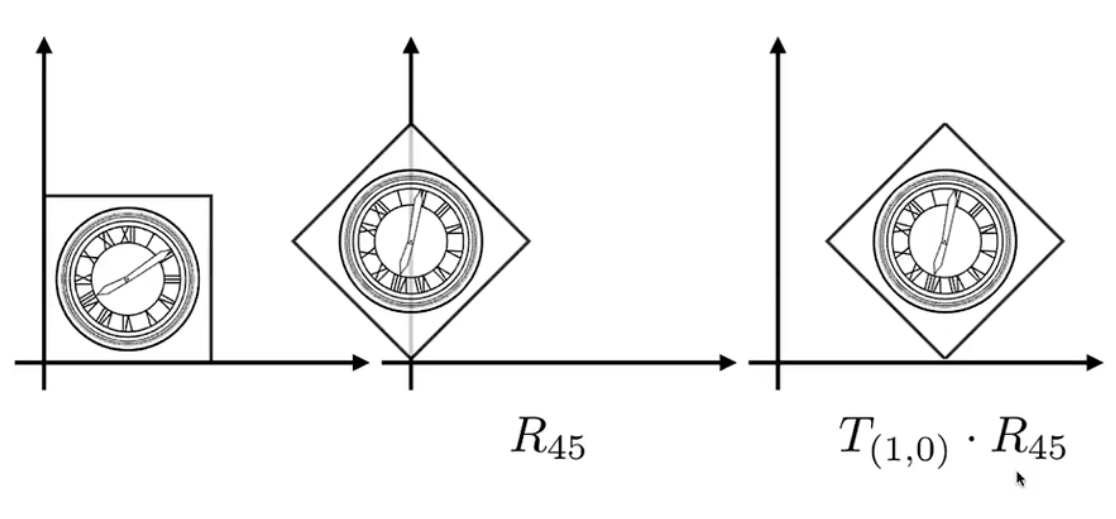
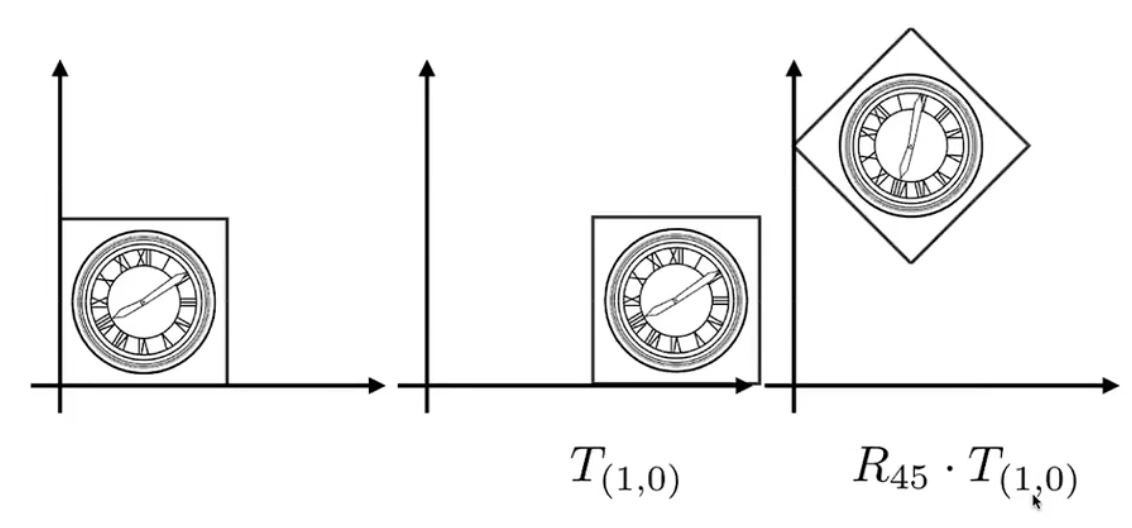
变换的顺序问题
先平移后旋转 和 先旋转后平移 是不同的(矩阵是不满足交换律的)。
组合变换:
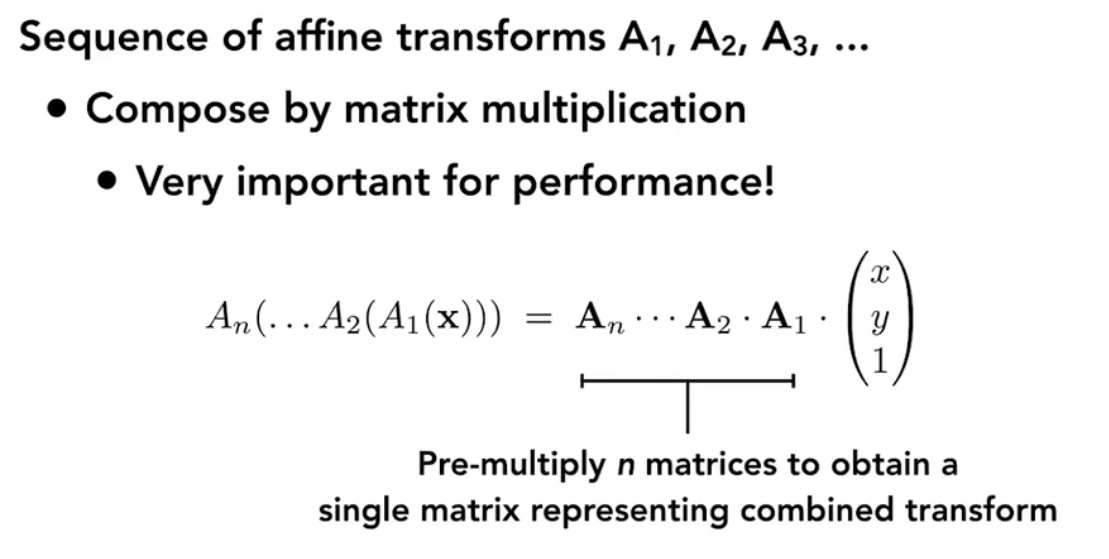
矩阵虽然没有交换律但有结合律:我们可以提前把$M = A_n…A_2A_1$先算出来,那么对于其他点也做同样的变换时:我们可以直接让他乘上这个矩阵,提高了效率。
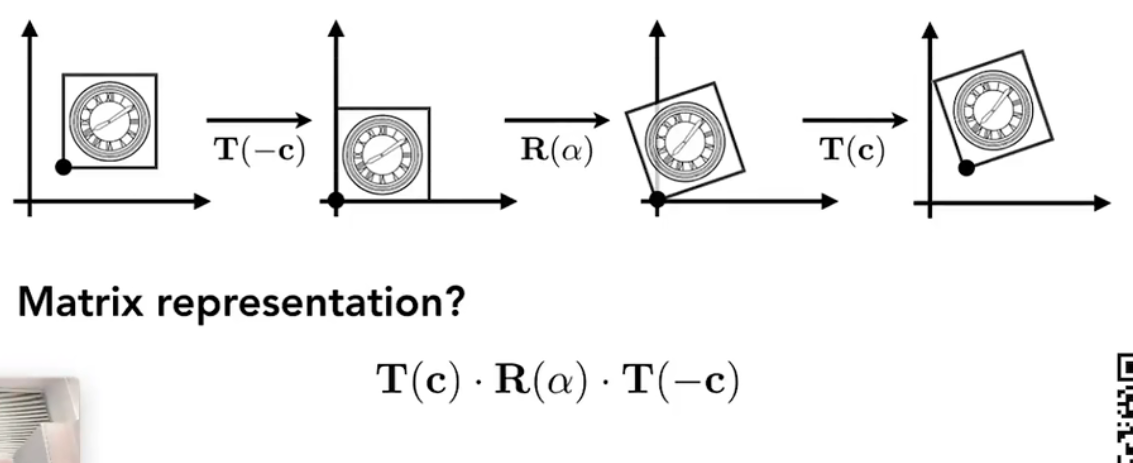
分解变换:
组合变换的逆过程
假如我们希望绕原点旋转:首先需要移到原点,然后旋转,再移动回去。
Lec4: Transformation Cont.
模型变换(modeling transformation)
3D transformation
和二维没有什么区别,多了一维$z$。
现在的仿射变换矩阵就是4*4的矩阵:
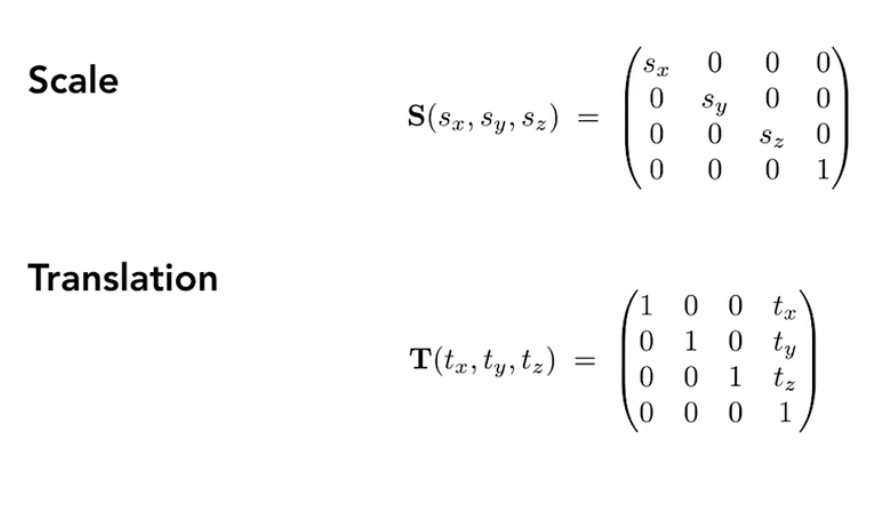
缩放和平移:
3D 旋转
一个旋转可以分解成三部分:绕x轴转,绕y轴转,绕z轴转。
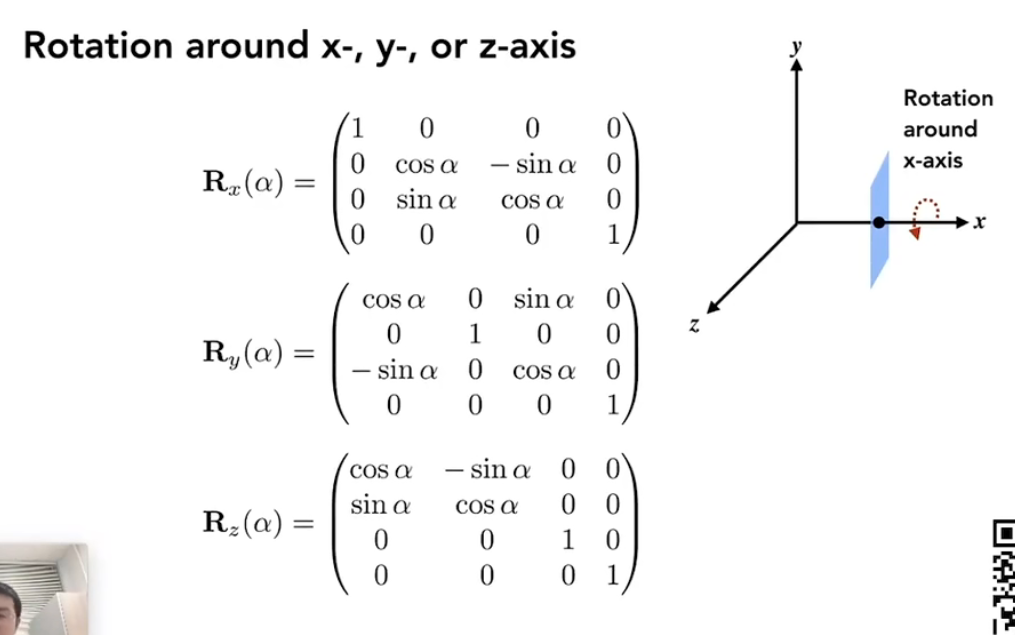
对于绕x,绕z,发现只需要把会动的对应坐标轴对应写成二维旋转的形式即可。
但是对于绕y轴旋转会发现,他对应的矩阵中包含$\alpha$的地方都变成了相反的(观察橙色部分)。
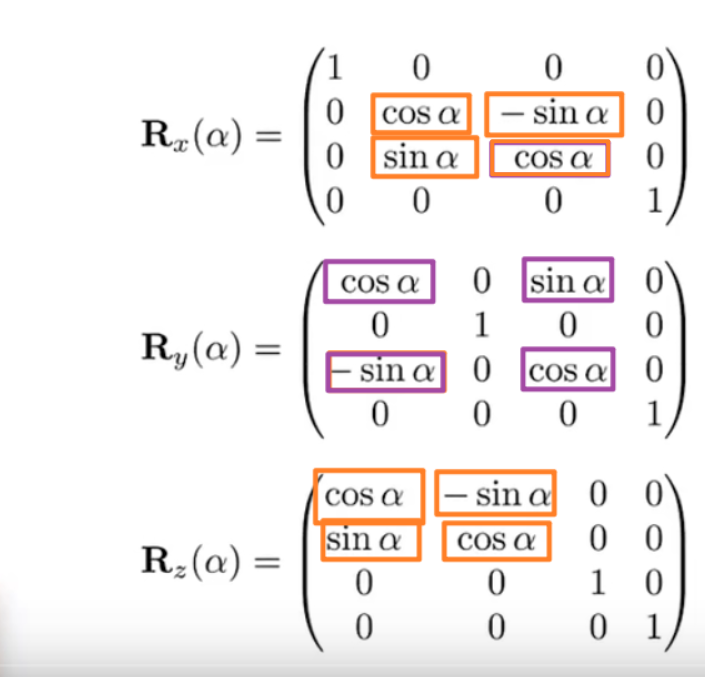
但这是正确的,通过右手螺旋定则发现:
- 绕$x$轴转动时,$y \cross z$的方向就是$x$的方向
- 绕$z$轴转动时,$x \cross y$的方向就是$z$的方向
- 而绕$y$轴转动时,$x \cross z$的方向却是$-y$的方向,因此想要逆时针转应该加上转置或者取逆。
因此:
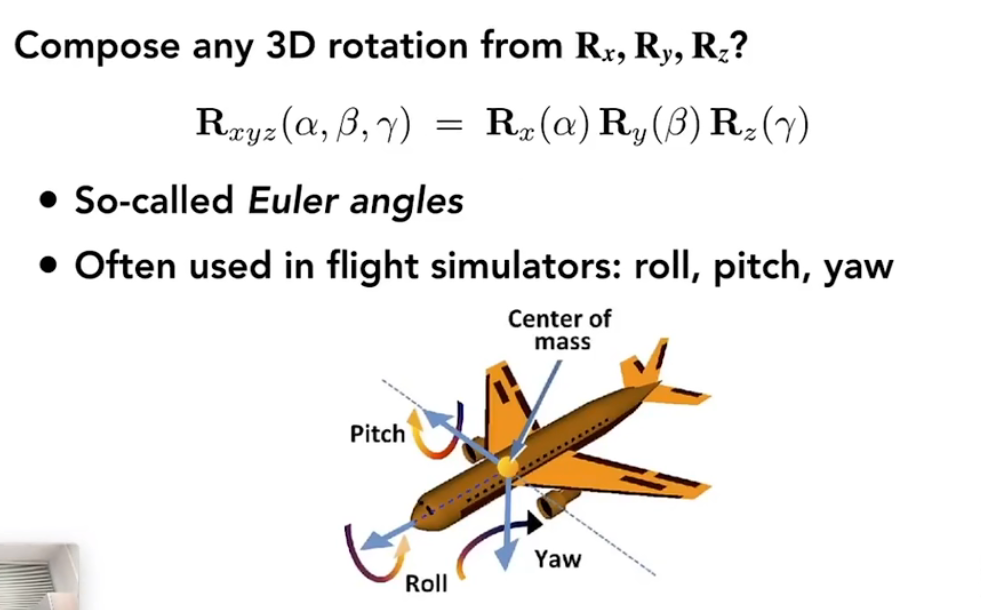
任何一个旋转都可以看成绕$x$轴转,绕$y$轴转,绕$z$轴转的合成.
$\alpha,\beta,\gamma$叫做欧拉角
罗德里格斯旋转公式:
我们还有一种常用的方式是:绕着某一个轴旋$\bold{n}$转一个角度$\alpha$,这会利用到罗德里格斯旋转公式。(在这里我们默认旋转轴过的是原点)
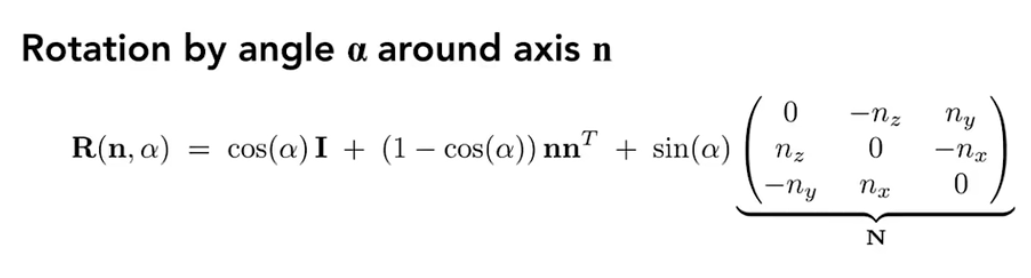
如果有需要让他绕着非过原点的旋转轴怎么办? 先平移再旋转再平移回来即可。
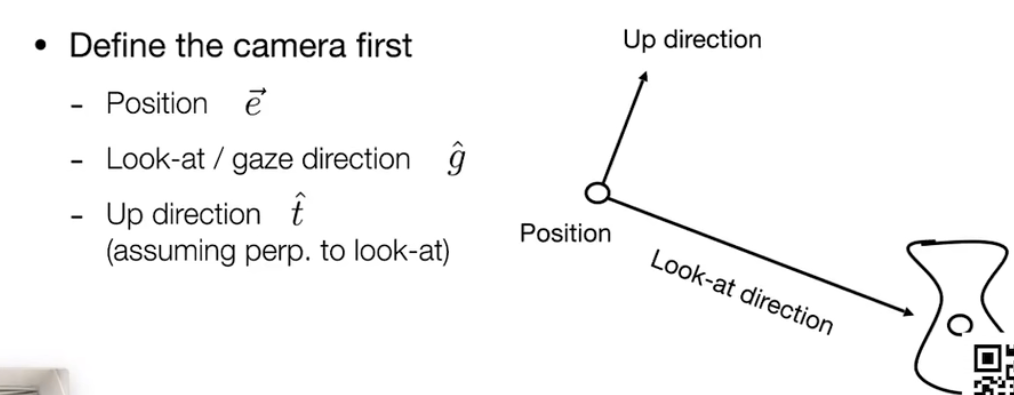
相机变换(Camera transformation)
这一部分本质就是找一个位置放置照相机。
因此我们需要这几个要素:
- 相机的位置 $\vec{e}$
- 向哪儿里看 $\hat{g}$
- 相机向上朝向的方向 $\hat{t}$ (注意有相机位置和朝向后并不能确定的排除一个照片,因为相机还可以绕着$\hat{g}$旋转,造成找出的照片角度不同)
首先我们规定一个相机标准位置:位于原点,相机上方方向为$y$轴,相机朝向为$-z$方向。
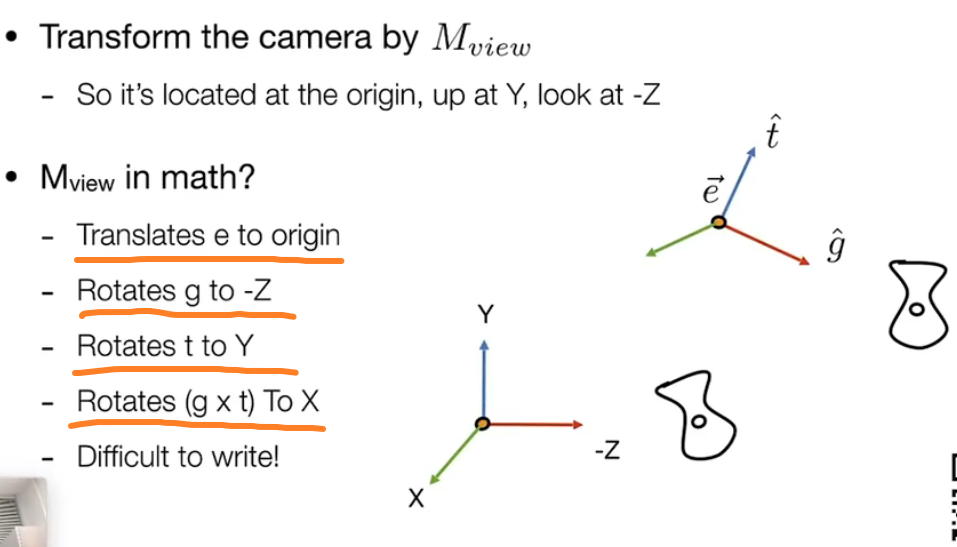
其中前三部做到,第四步就自然而然做到了,因此我们只需要对前三部操作即可。下面考虑把以上这些操作写成一个矩阵:
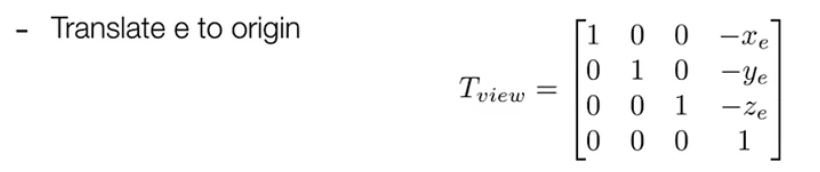
首先需要移到原点:
随后需要做旋转,把一个向量旋转到 $-z$或是$y$都是不容易的,不妨考虑他的逆过程,从$x$轴到$g\cross t$ ,$y$轴到$t$,$z$轴到$-g$ 是有公式可用的,即$R_{view}^{-1}$ 。
这里的$R_{view}^{-1}$ 怎么得来的呢?
我们希望把向量$x(1,0,0,0)$ 向量$y(0,1,0,0)$ 向量$z(0,0,1,0)$ 转移到 $t,-g,g × t$构成的新坐标系。简单来说我们希望:从$x$轴到$g\cross t$ ,$y$轴到$t$,$z$轴到$-g$ 的映射被矩阵$R{view}^{-1}$表达出来,我们可以把向量$x(1,0,0,0)$ 向量$y(0,1,0,0)$ 向量$z(0,0,1,0)$ 左乘$R{view}^{-1}$发现:得到的正好是对应的新轴的x的坐标。下面我举个例子,以x:$(1,0,0,0)^T$为例,左乘$ R_{view}^{-1} $得到:
说明这个旋转矩阵可以把x向量经过旋转成为了$g\cross t$ 向量,也就是我们希望对应上的向量。我们可以发现这种旋转矩阵的构造十分自然美妙。
在上一节提到了旋转矩阵的逆矩阵等价于转置矩阵,因此$R{view}$ 等价于 ${R{view}^{-1}}^T$ 。

到此完成了基本的视图变换。
投影变换(projection transformation)
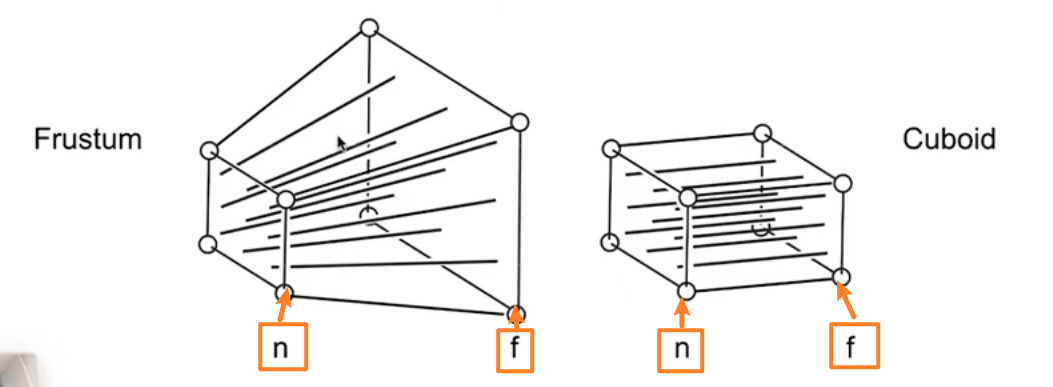
透视投影 vs. 正交投影:
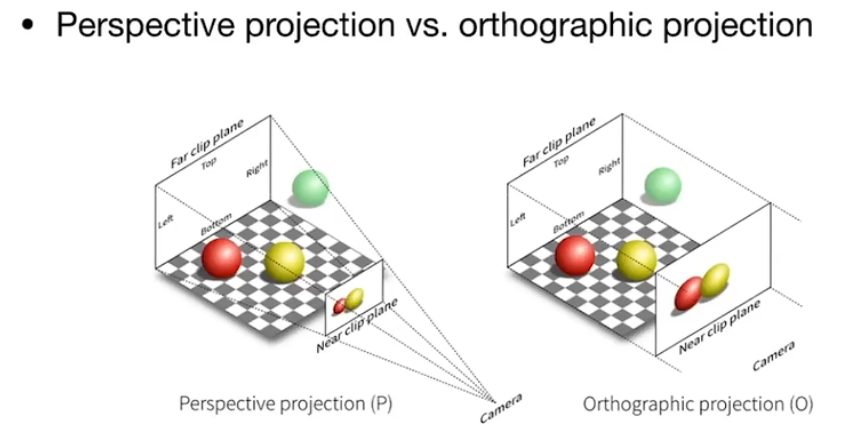
我们看左图的透视投影,远近不同,球大小也有区别,而正交投影没有这个特点。
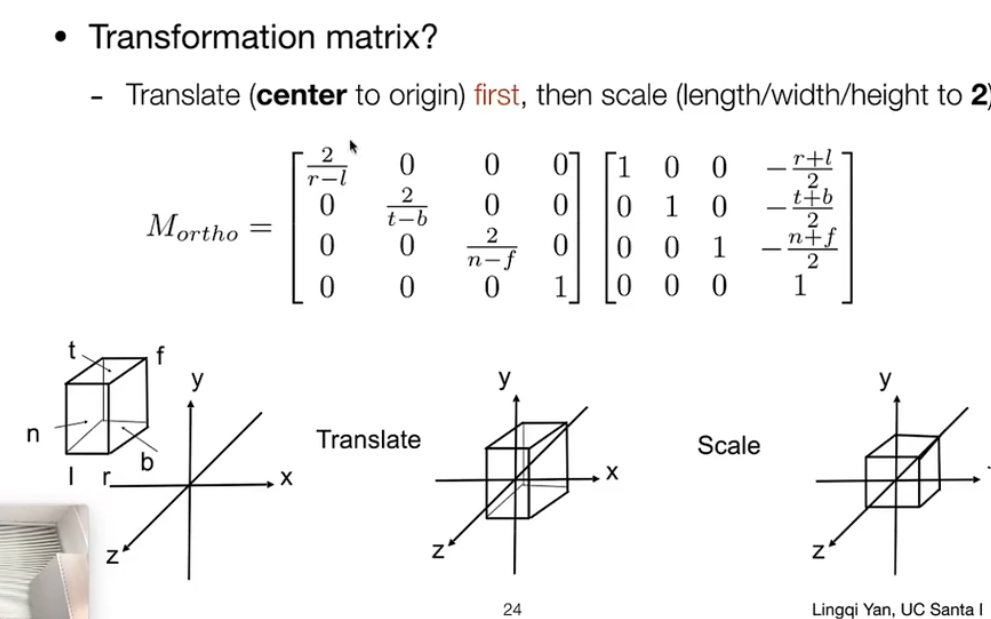
正交投影
如何做一个正交投影?
- 平移到原点
- 尺度变换:缩小长高宽到2,这样可以使得一个长方体变成$[-1,1]^3$的标准立方体。
透视投影
一组平行线在透视投影中是可能相交的:

怎么做透视投影?
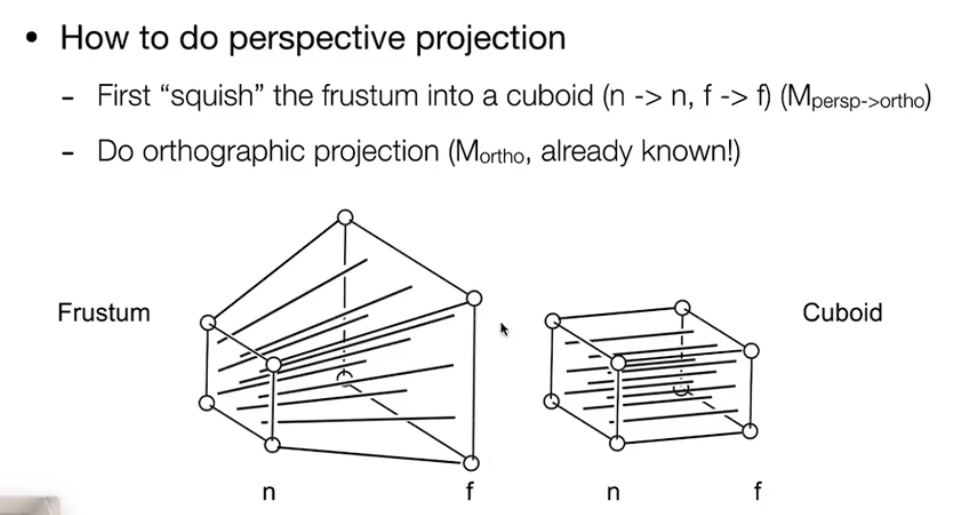
- 把截头锥体压扁成一个长方体
- 做正交投影
正交投影我们会做,那么现在只需要如何压扁一个截头锥体:
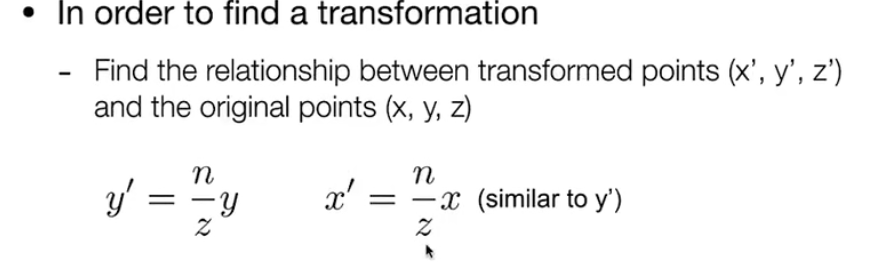
不妨先考虑在$yz$平面上如何变化:
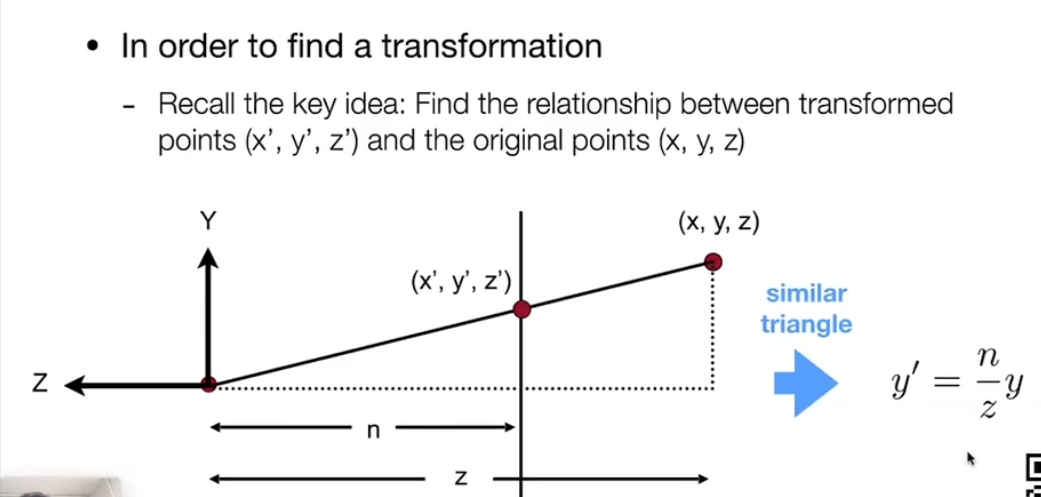
同理在$xz$平面上也是这样:
因此我们直接分别对x和y进行变换压缩至x’,y’处(注:此时z轴变换暂时不考虑):
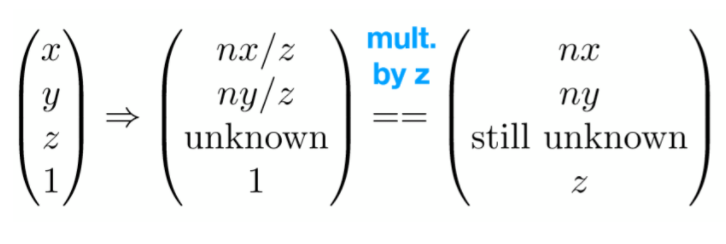
那么什么矩阵可以做一个这样的变化呢?我们设这个矩阵为$M_{persp \to ortho}$, 即希望找出下面这样的一个矩阵:
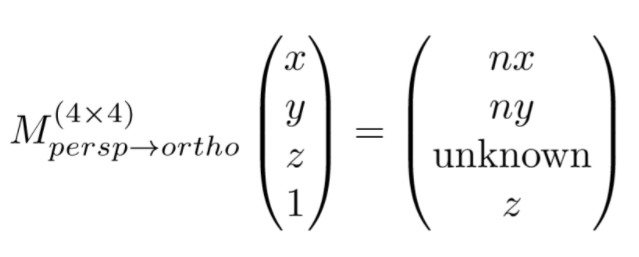
这个矩阵的1,2,4行是很容易确认的,即:
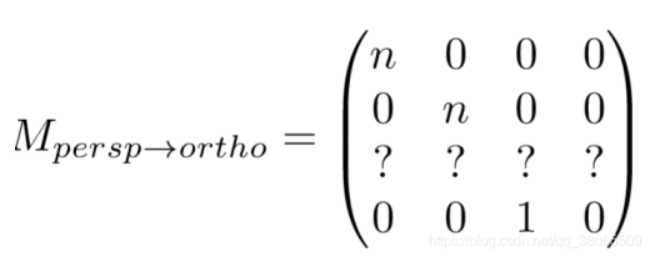
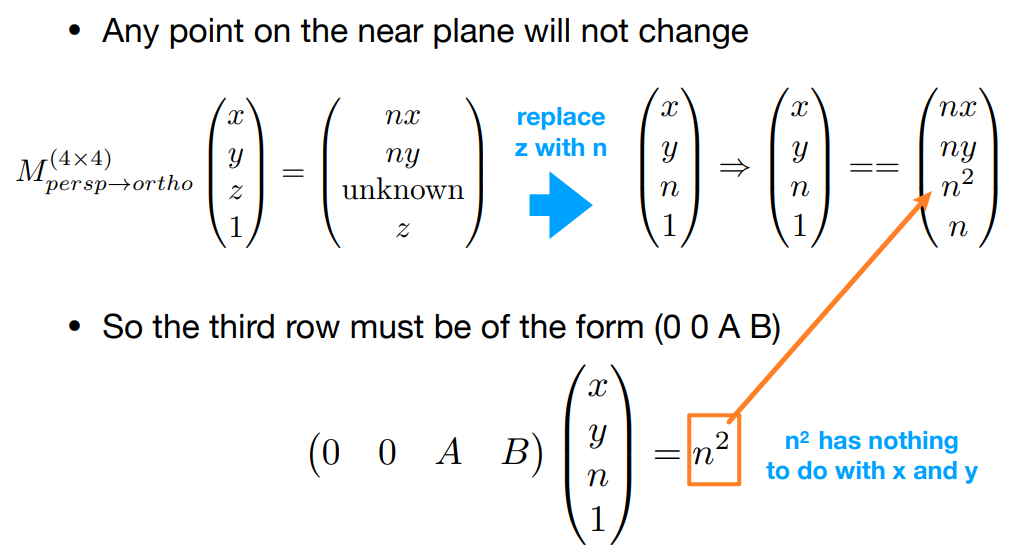
现在只需填上第三层即可,透视投影的一个特性是:截头锥体的前后面变换之后z坐标不变,因此我们可以找出两个特殊的点:
- 近平面上任何一点通过投影变换后z坐标不会变(即坐标(x,y,n))
- 远平面上任何一点通过投影变换后z坐标不会变(即坐标(x,y,f))
我们希望 坐标(x,y,n) 变换后的z轴还是n:
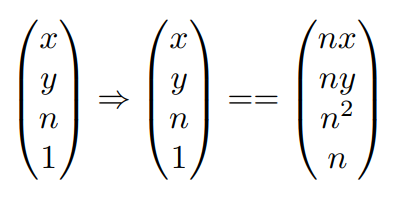
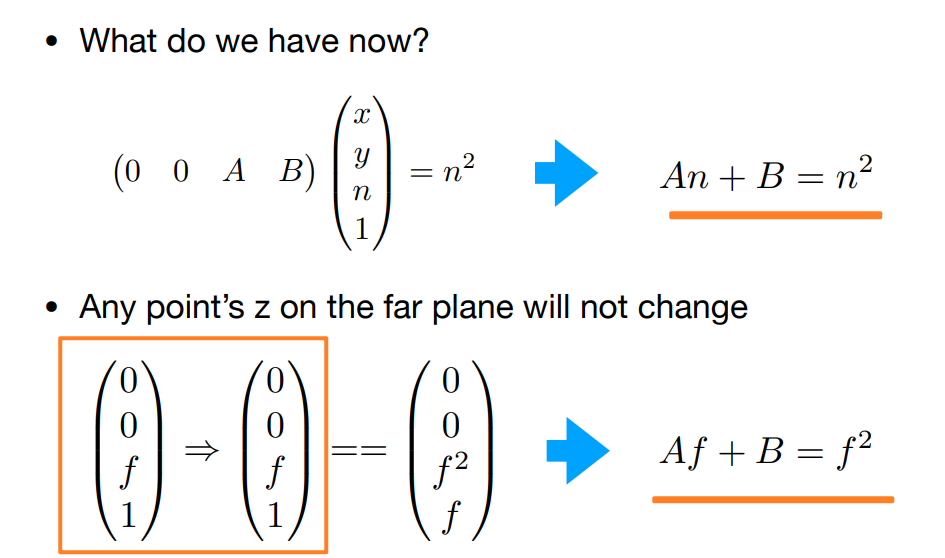
只需要让$M_{persp \to ortho}$ 的第三行符合下式(0 0 A B)的形式,并满足和近平面坐标相乘后等于$n^2$:
但此时AB还是没有具体求出来,不妨再考虑一下原平面,同理得到:
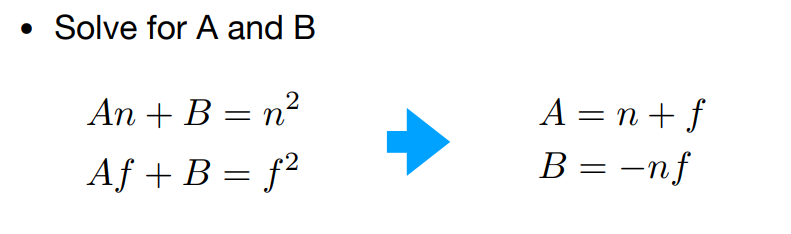
因此就可以解出AB分别为:
那么现在做透视投影就可以直接这么运算: 先将透视投影转换为正交投影,然后再做正交投影。

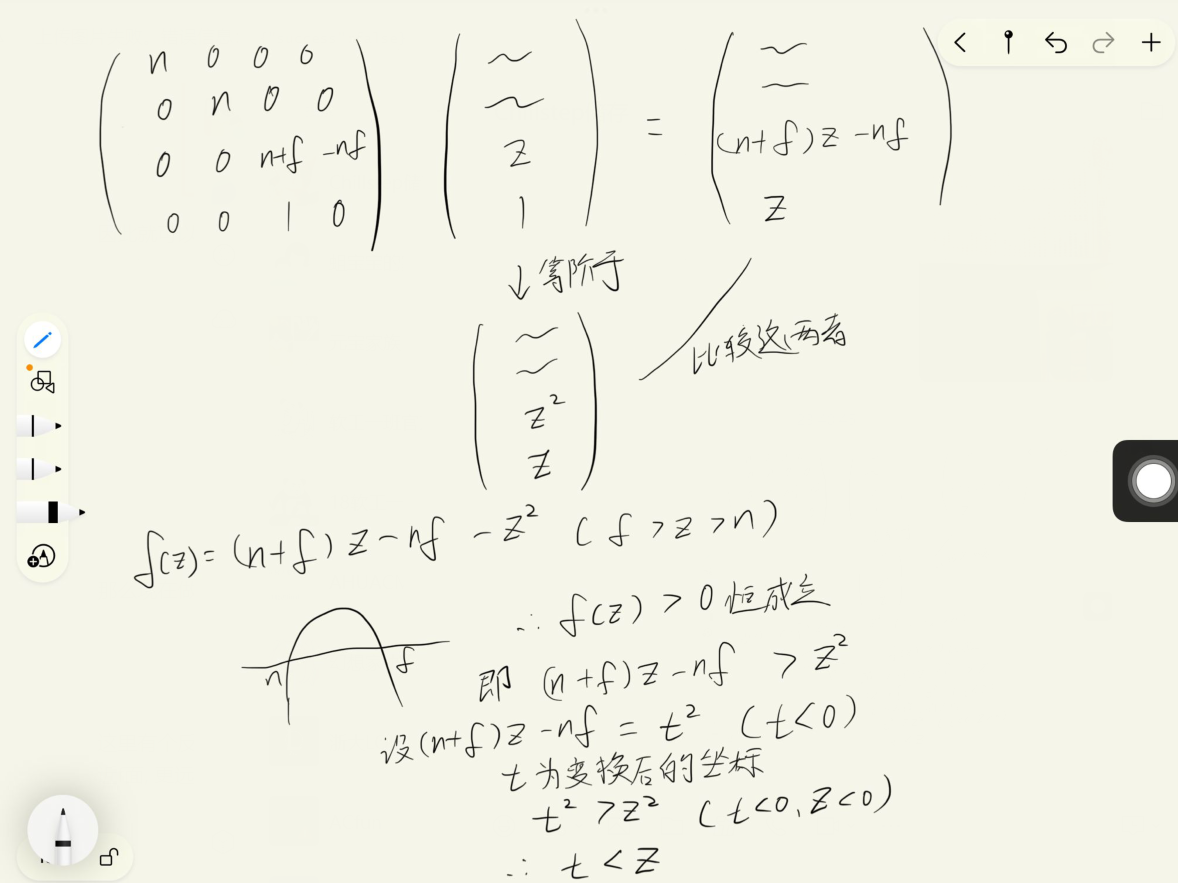
在透视投影转正交投影的变换中有个反常识的现象: 也就是截头锥体的中间一点(x,y,z) 其中f>z>n, 这样的一点在经过透视投影转正交投影变换矩阵时,会变得更加接近f面, 更远离n,也就是变换后的坐标回会比z更小。证明如下:

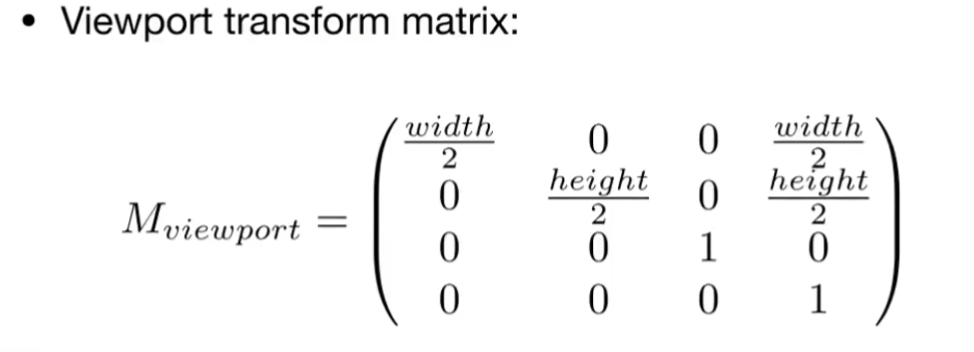
视口变换(ViewPort Transformation)
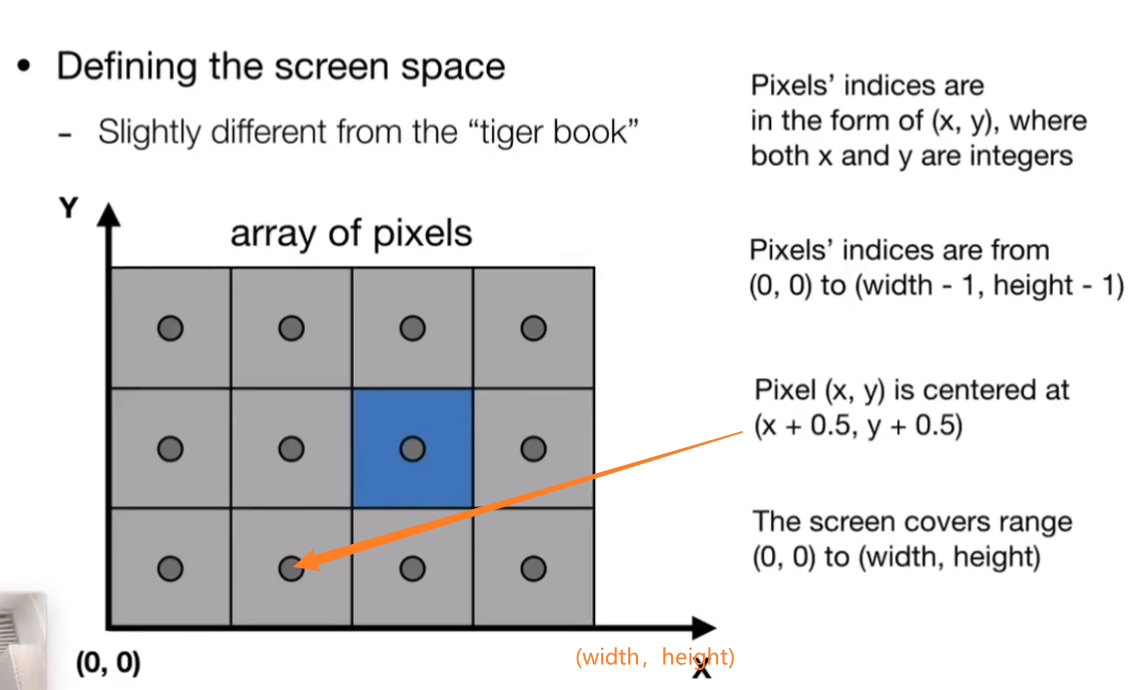
我们希望把$[-1,1]^3$的拉伸成$[0, width]×[0,height]$, 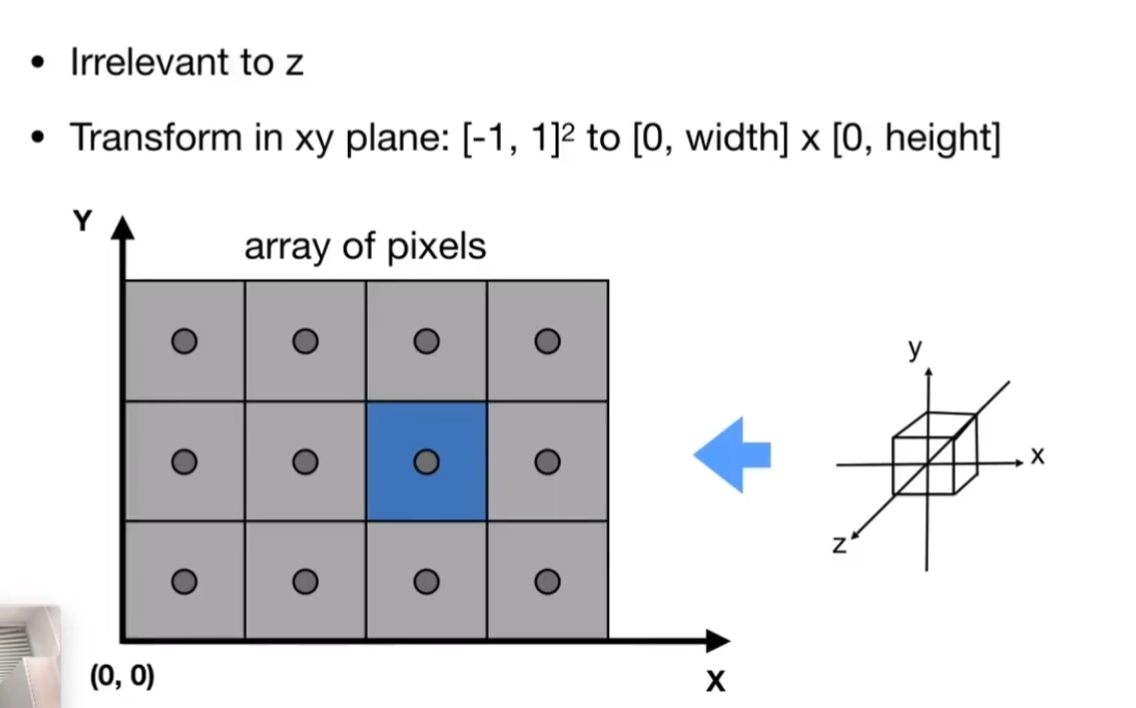
我们直接做scale+偏移:宽度上原来是-1,1扩大到$[-width/2,+width/2]$, height同理,同时我们还需要做完后做一个偏移,让范围变到$[0,width]*[0,height]$
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!