强化学习纲要Ch6-价值函数近似-上
价值函数近似—上
Plan:
前面提到的状态量都很小,而许多实际环境得状态量是很多的:
比如围棋局面高达:$10^{170}$, 那么这么多的状态必然是不能有概率转移矩阵的,因此状态很多的强化学习任务一般也都是model-free的。
回想之前在model-free中我们是怎么进行policy evaluation的? 是通过填写Q-Table。
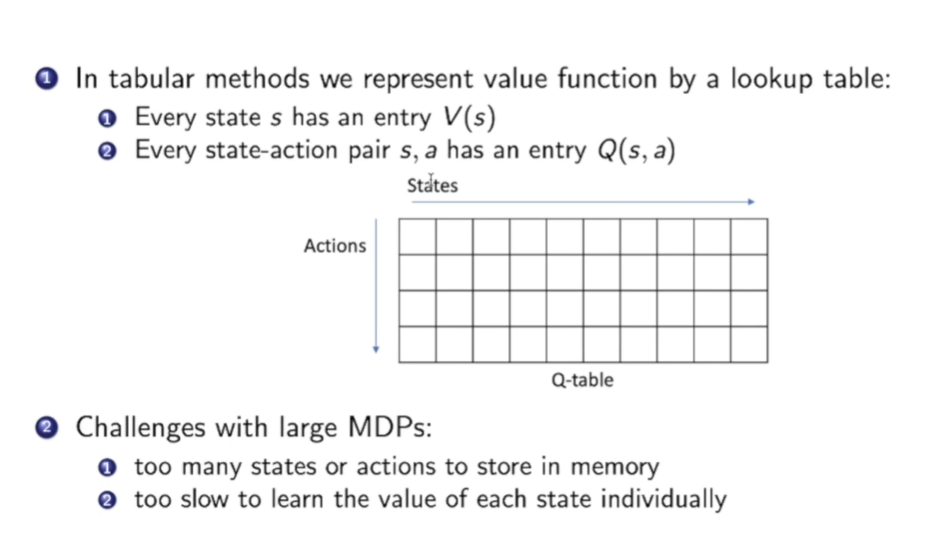
而在状态数过多时,填写Q-table根本不可能。
这里一个trival的想法就是函数近似:
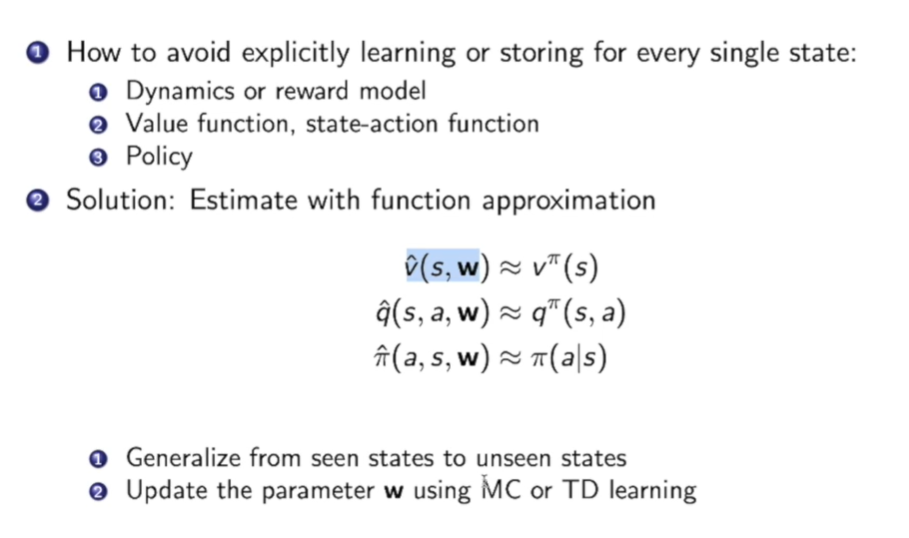
我们想通过见过的状态来近似估计出价值函数,状态动作函数,策略函数等,希望可以泛化到未见过的状态上。
比如对于价值函数$v$, 可以这样设计:
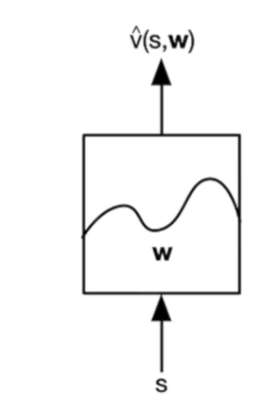
输入状态,通过学习$w$,最后得到价值函数$v(s,w)$
对于状态动作函数$q$, 有两种可行的设计方式:
一种是输入状态s和动作a,学习参数w,得到q(s,a,w):
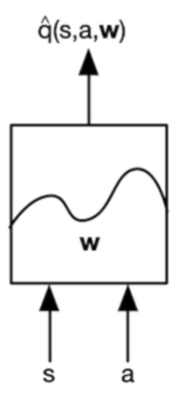
另一种方法是,通过输入状态,学习参数w,得到各种动作的q值,然后我们使用时直接加一个argmax即可:

对于函数估计:
- 可以采用线性的把feature combine起来
- 神经网络
- 决策树
- 近邻(Nearest Neighbour)算法
我们这里假设我们已经指导真正的价值函数$v^{\pi}$,我们的近似函数为$\hat{v}$ :
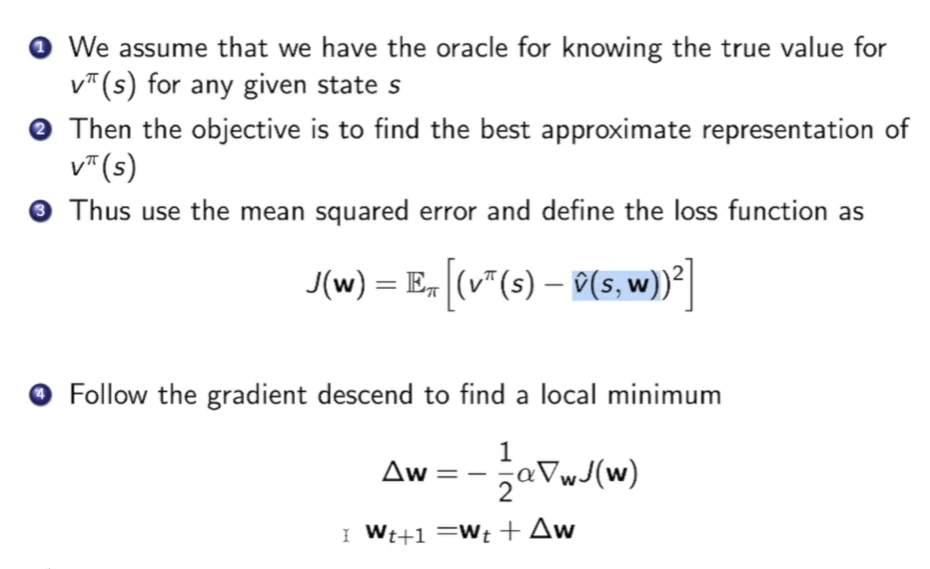
通过上图计算它们的差距$J(w)$,最小化$J(w)$ 就是我们现在的任务,可以使用梯度下降来做。
状态的表示方法:
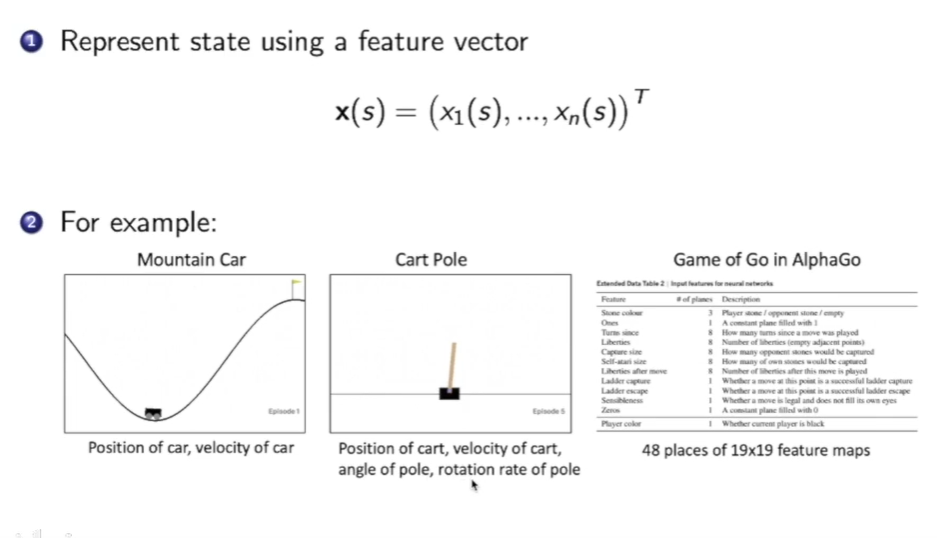
状态可以用一个向量$x(s) = (x_1(s),…,x_n(s))^T$来表示,向量中可以有很多东西:比如在上图左下角的mountain car中,我们可以选择车的位置,车的速度。在 cart pole游戏中可以选择木块的位置,木块的速度,杆的角度,杆上端的速度等…
线性模型来拟合函数:
可以写为:
所以现在目标函数可以写为:
那么他的梯度+stepsize设置为$\alpha$时可以表示为:
然后梯度下降。
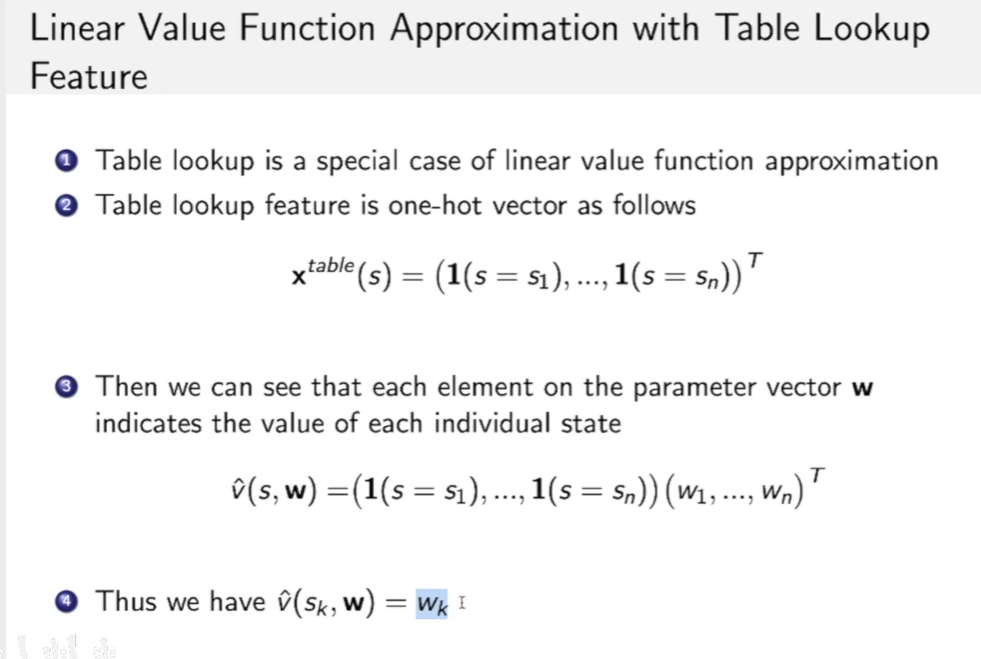
这里运用了一个Table lookup feature的写法:
他把多个$x(s)$组合在一起变成一个表$x^{table}(s)=(1(s=s_1),…,1(s=s_n))$ ,这样的方法类似于one-hot编码,是哪儿个状态就对应位置是1向量 ,其他是0向量。
因此:$\hat{v}(s, \mathbf{w})=\left(\mathbf{1}\left(s=s{1}\right), \ldots, \mathbf{1}\left(s=s{n}\right)\right)\left(w{1}, \ldots, w{n}\right)^{T}$,其中$w_i$在此时代表权重向量$w$和$x(s_i)$的向量乘积。
预测(Prediction)问题, 怎么求价值函数:
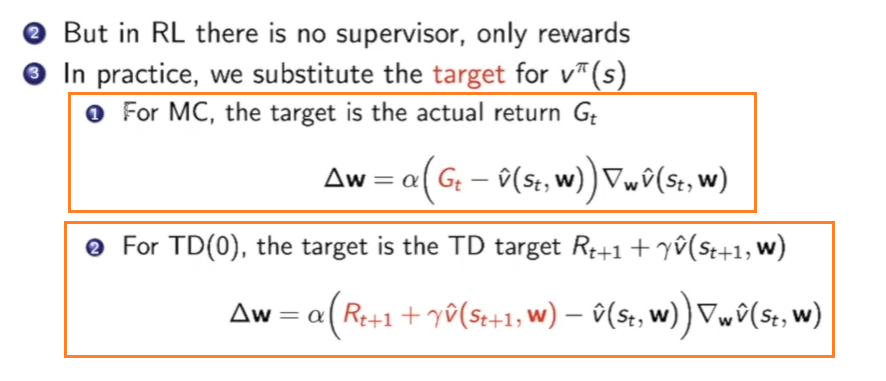
之前都是再假设我们有$v^\pi$,但实际上我们并没有,因此可以借用model-free中的想法,用MC或者TD的方法来估计并代替$v^\pi$:
原式为:

现在我们要用MC的方法或者TD的方法来搞:
下面我们详细的说一下MC和TD的方法
- MC方法:

MC的方法是无偏的估计,但是由于抽取单个一般都是噪音很大的,因此我们需要选取多个求平均。

这样我们就可以产生一些trainning 数据,它是一个个Pair。
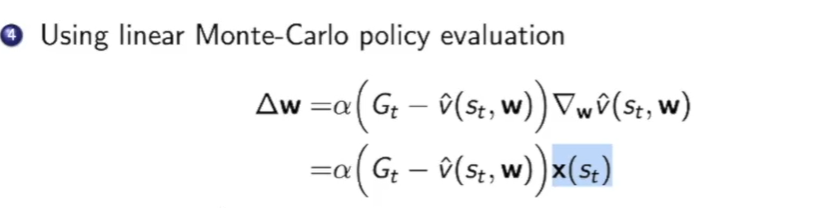
在线性模型中$\Delta_W\hat{v}(s_t,w)$是一个线性的,即xw,因此可以直接求偏导得出$x(s_t)$
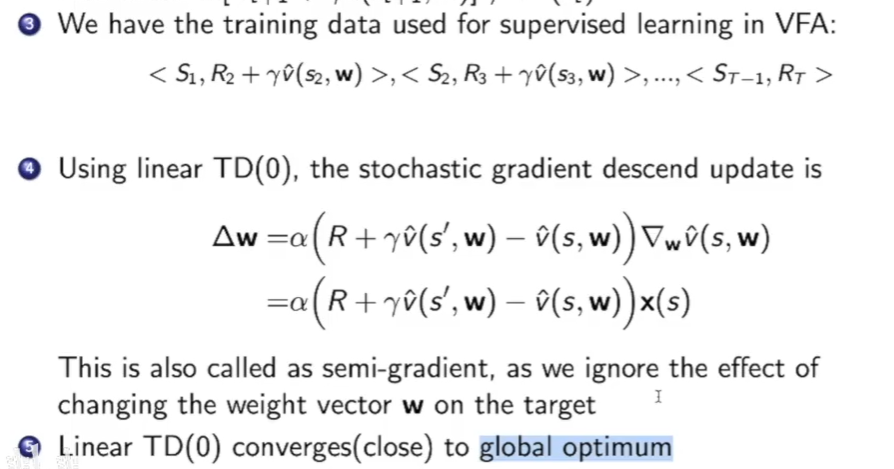
- TD方法:

TD方法用TD target代替了真实价值。这是一个有偏的,因为TD target的抽样期望并不等于$v^\pi(s_t)$, 因为TD target中包含了我们上次的估计,这种在估计上估计肯定是有偏的。
因此我们也可以把这种方法发到control问题的第一步policy evalution
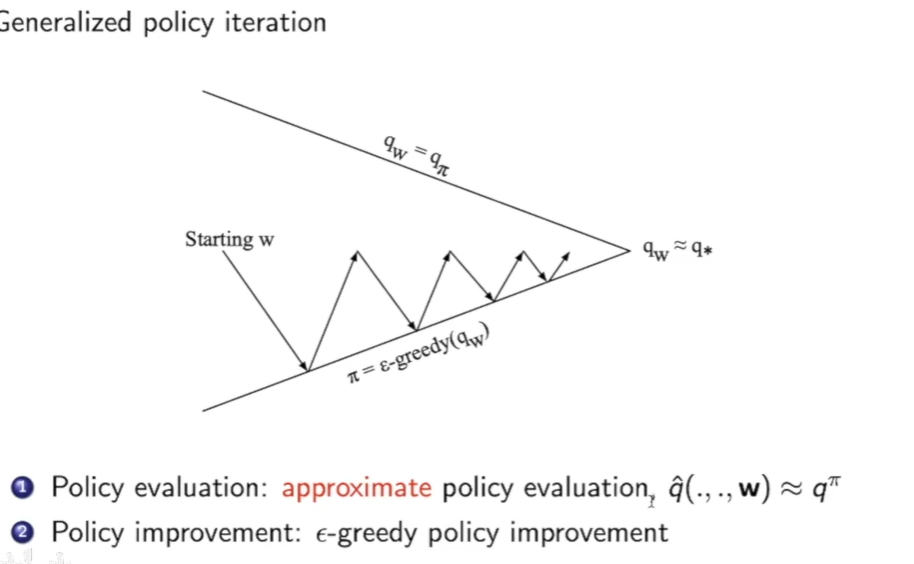
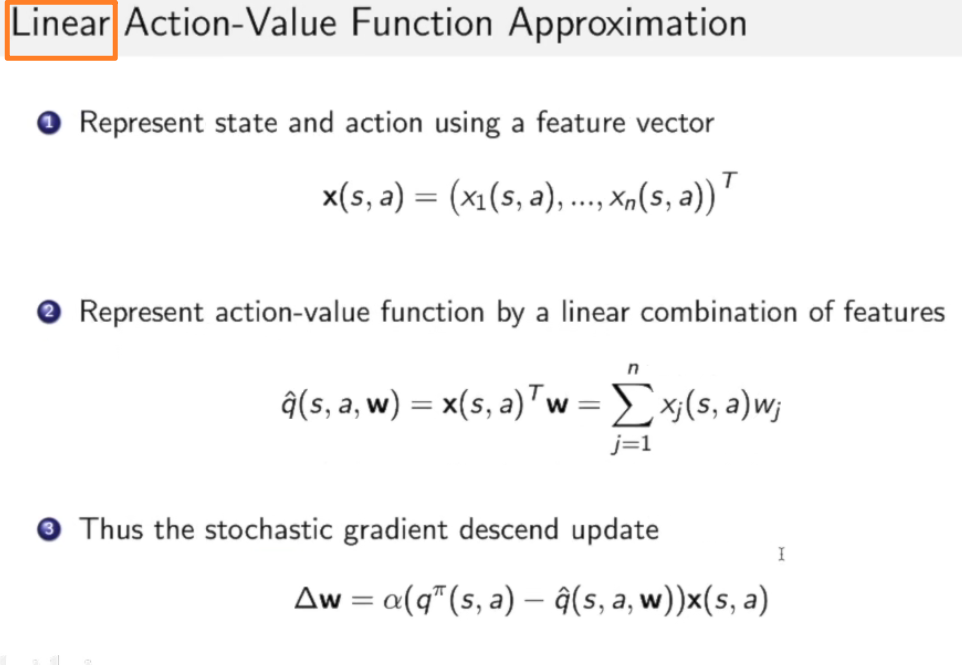
拟合行为价值函数,和状态价值函数相同的方法:
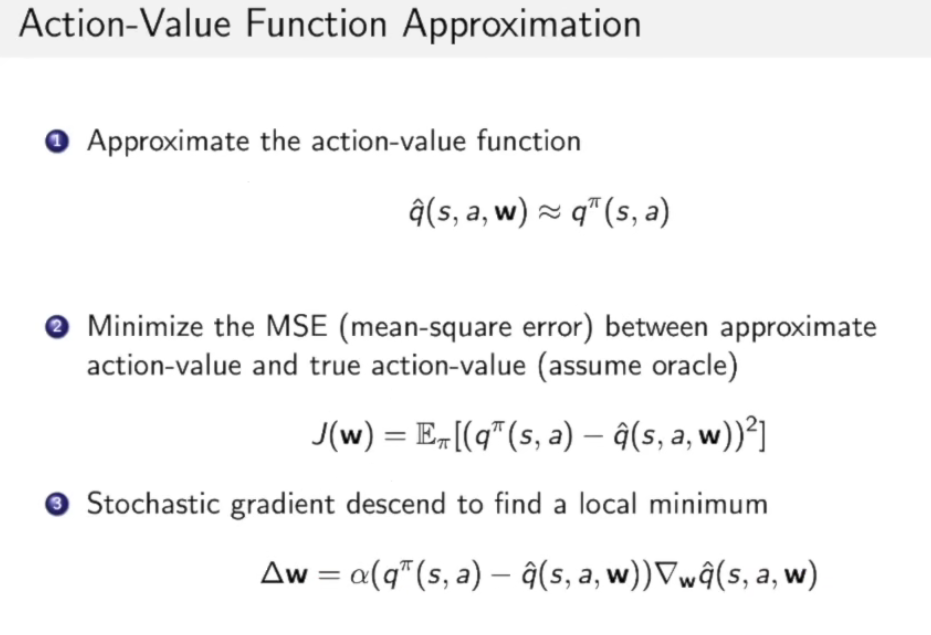
这里我们还是假设行为价值函数Action-Value Function是一个通过不同feature线性的组合得到的函数:
由于我们还是和之前一样假设了我们已知q函数,但实际上我们是不知道的,因此还是需要TD Target或者MC的抽样来做替换。
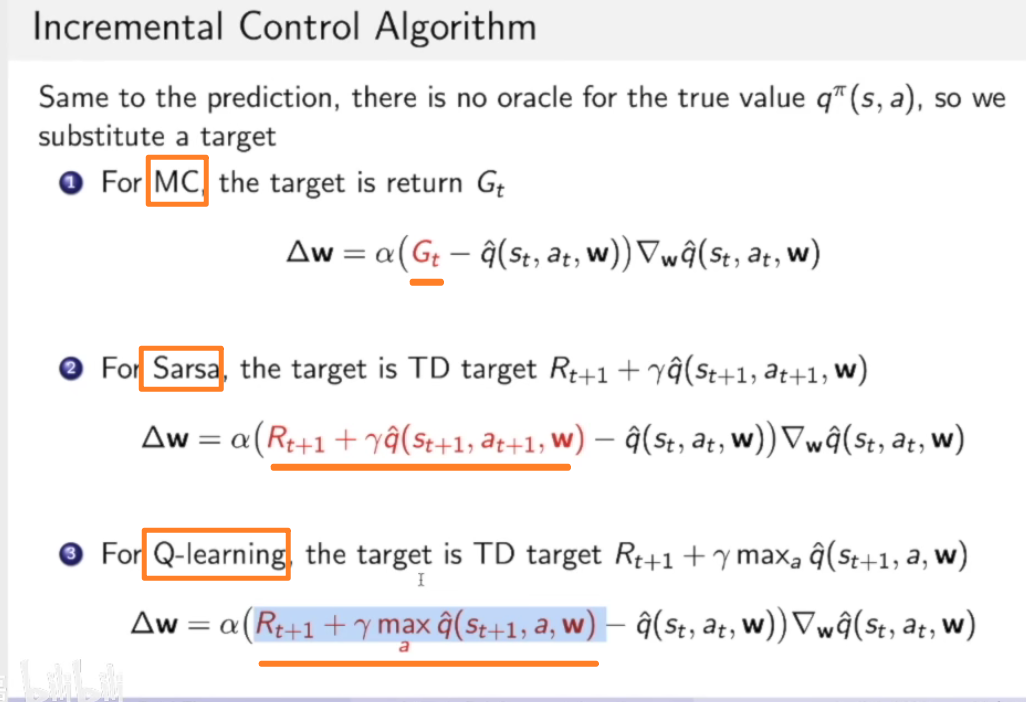
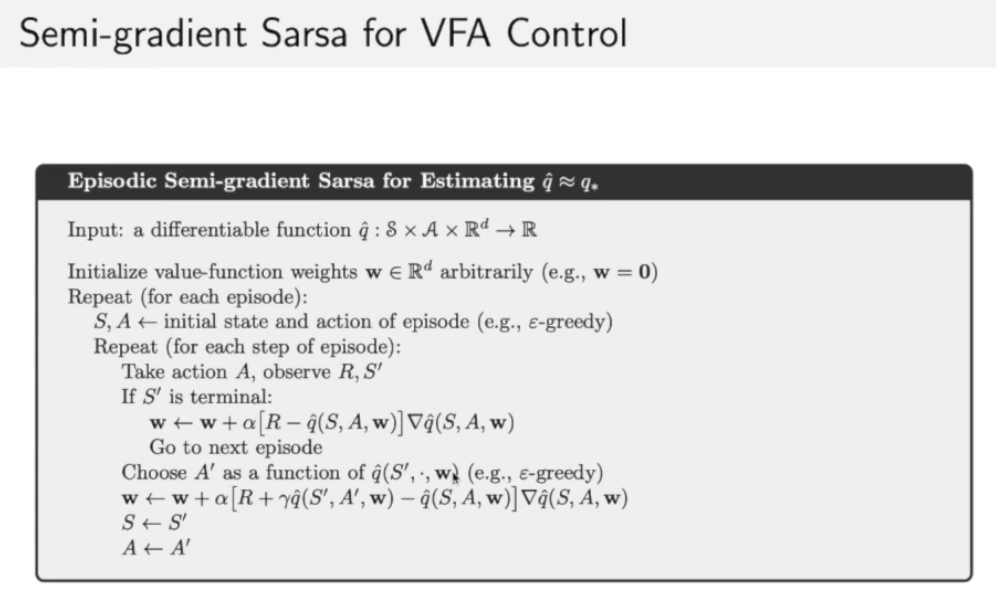
总结:
上面算法进行更新时有关收敛的问题:
- TD Target对w的梯度包含了w,这其实是不太准确的。
- 首先TD Target和就是一个估计的过程,我们用这个估计出来的值去做梯度下降,去估计价值函数,这有太大的不确定性。
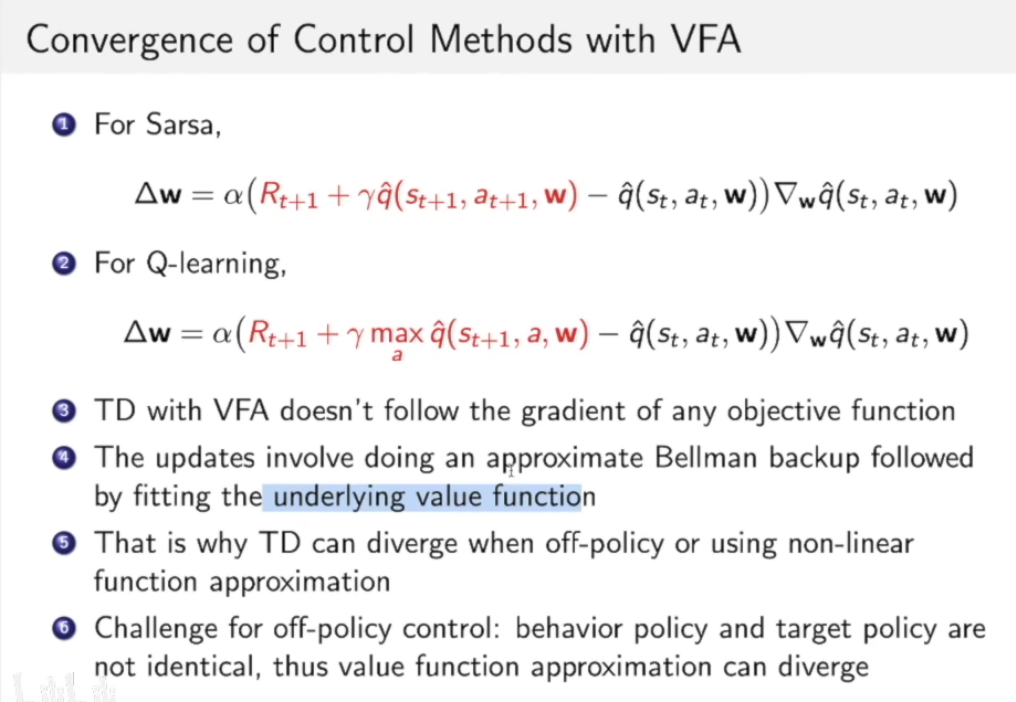
- 上面我们都是在用linear的function,事实上,当我们使用non-linear function进行拟合时或者是off-policy的方法进行拟合时结果非常不稳定。
强化学习训练不稳定的原因:
- 函数估计所造成的误差
- Bootstrapping会使得估计是在之前估计的基础上估计的,比如TD Target的第二项本来就是估计的,现在却要用这个估计的来更新训练估计价值函数。
- off-policy训练中,采集到的数据是behavior policy所得到的,而我们优化的函数确实在另一个数据分布上的函数。
有关能否找到最优解的问题:
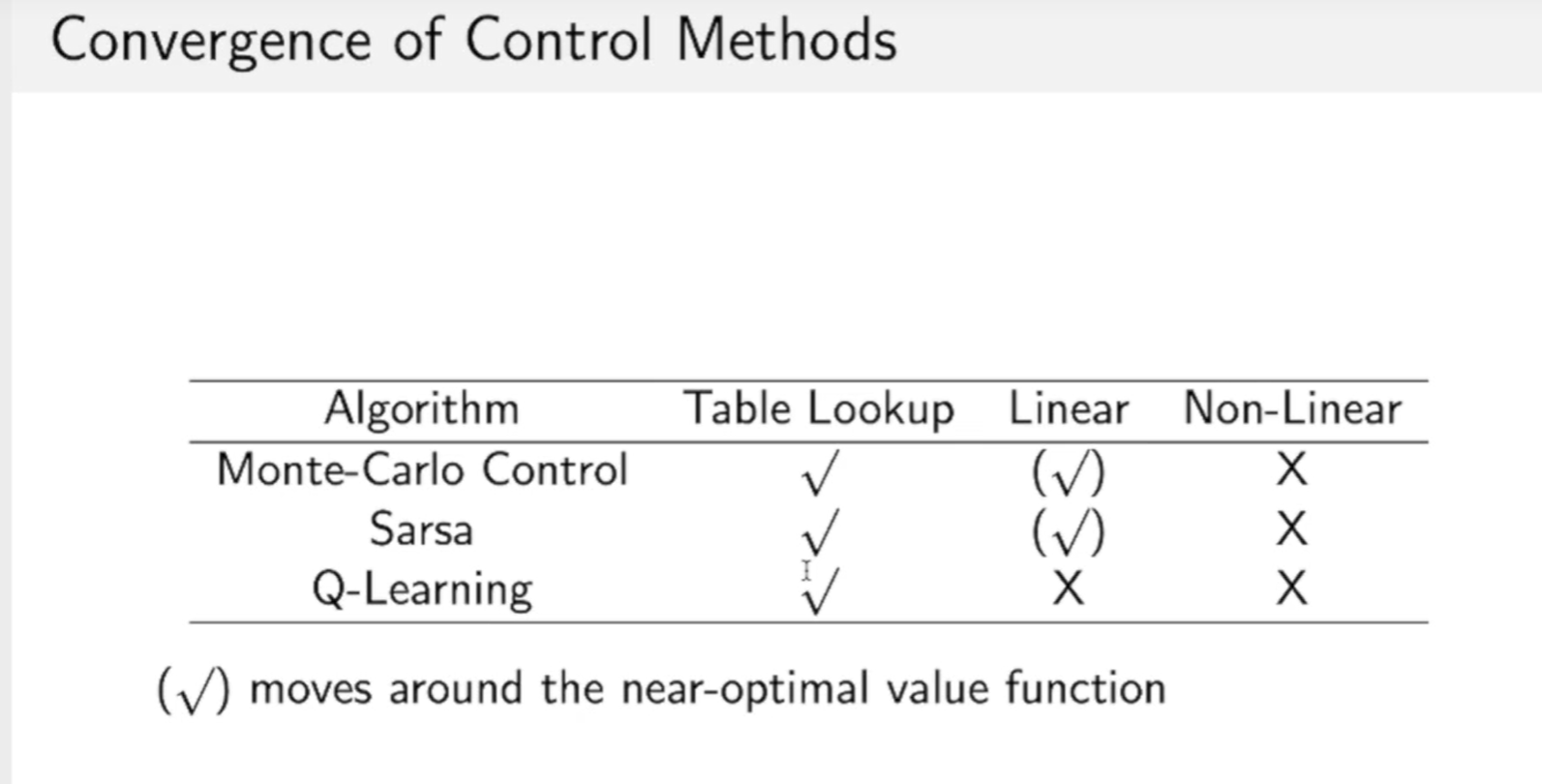
用Table Lookup方法一般都是可以找到最优解的。
在Linear的算法中,MC,Sarsa可以找到一个近似最优解的算法。而Q-Learning还是比较难找一个最优解。
Non-Linear算法下,三种方法都无法保证最优解。
现在我们优化的方法都是单步的优化,我们可以每次优化一个batch:
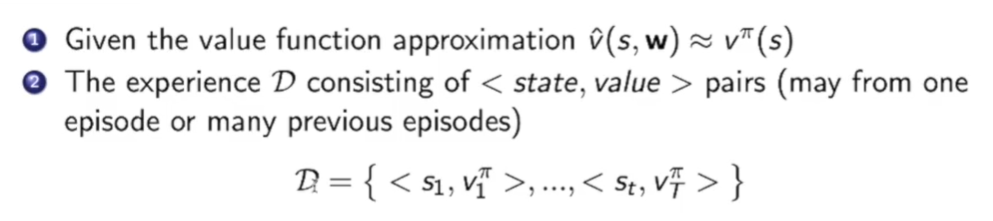
假设我们有一堆数据$D$, 数据类型为<状态,实际价值>,这里的实际价值可以用TD Target或者MC中的$G_t$来替换。
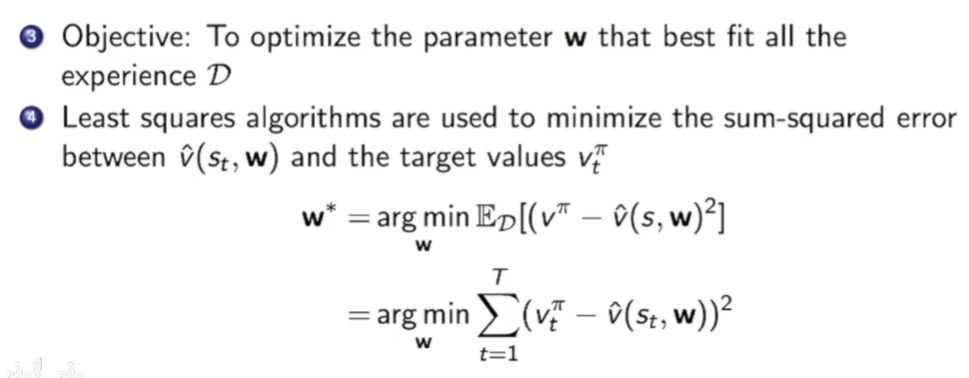
我们的目标是最优化w,使得w可以最好的fit model,也就是最小化$E_D$。
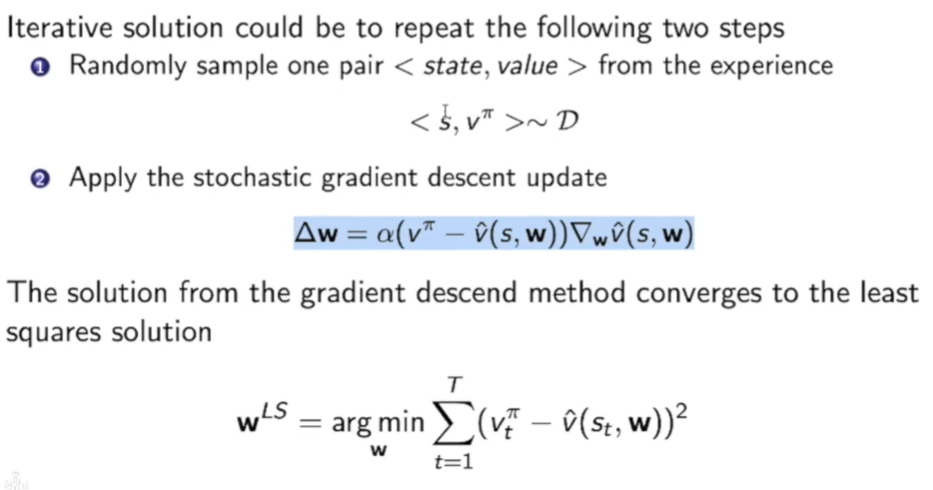
因此我们可以用mini-batch 的SGD来做梯度下降。
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!